
赵聪,同济大学交通学院副教授,加州大学伯克利分校联合培养博士,研究方向为AI + 交通信息与控制、车路协同与自动驾驶。入选中国科协青年人才托举工程、上海市青年科技启明星人才(A类)、东方英才青年人才等。担任中国公路学会自动驾驶工作委员会委员、世界交通运输大会自动驾驶路车协作技术委员会委员等。曾在国家发展改革委挂职锻炼,参编现代综合交通发展“十五五”规划、公路发展“十五五”规划,《节能与新能源汽车技术路线图3.0》智能网联汽车部分主要执笔人,积极服务国家战略与行业高质量发展。
近五年,以一作/通讯在交通、车辆、人工智能、控制、管理等学科交叉期刊发表论文45篇,其中一区Top期刊论文(IF≥7.4)21篇,ESI高被引论文11篇、热点论文2篇,入选《中国公路学报》(影响因子学科第一)年度优秀论文、交通运输重大科技创新成果(论文类)等。以第一发明人授权中国发明专利15项、英国专利6项,部分专利以授权使用的方式实现成果转化。参编上海市地方标准《港口自动驾驶集装箱卡车运行技术要求》,中国汽车工程学会国内首套车路协同自动驾驶系统功能可信性测评方法系列标准(共5部)、中国智能交通协会《弹性交通信息物理系统架构城市交通》等标准规范。成果受到国内外同行广泛关注,得到中国工程院院士、美国工程院院士、欧洲科学院院士、加拿大工程院院士、IEEE Fellow等专家的正面引用评价。
面向智慧港口、智慧高速、自主泊车等应用需求明确、区域边界可控的典型场景,将基础研究成果“可信感知-协同认知-领航控制”进行产学研协同模块化开发、系统集成与推广应用,创新研发形成室内外一体化泊位级导航系统和自主代客泊车系统,在北上广深等城市100余个大型停车场规模化应用;有效支撑港口自动化运输系统研发及体系化建设,成功落地上海港(吞吐量连续15年世界第一)、秘鲁钱凯港(“一带一路”标志性工程)等国内外重要港口。作为主要完成人的项目“城市停车全域数字化与管理智能化关键技术及应用”获上海市科技进步一等奖(排名第2,2022)、“智能路网交通全息可信感知与动静协同调控关键技术及应用”获中国发明协会发明创新一等奖(排名第1,2024)。
主讲交通数据分析、运输经济学、交通科技竞赛等交叉学科课程。指导本科生获得全国交通科技大赛一等奖、全国高校智能交通创新与创业大赛一等奖等荣誉。指导的多位本科生、研究生毕业赴UC-Berkeley、MIT、清华大学、北京大学等国内外一流高校深造。
📖 教育经历
- 2010.09 - 2014.07, 同济大学, 交通工程, 学士.
- 2014.09 - 2017.07, 同济大学, 交通运输工程, 硕士.
- 2018.11 - 2019.12, 加州大学伯克利分校, 交通研究院, 联合培养博士.
- 2017.09 - 2020.08, 同济大学, 交通运输工程, 博士(导师:杜豫川教授).
💻 工作经历
- 2020.11 - 2024.02, 同济大学, 交通学院, 博士后(导师:何积丰院士).
- 2024.03 - Present , 同济大学, 交通学院, 副教授.
- 2025.01 - Present , 国家发展和改革委员会, 基础设施发展司, 挂职锻炼.
🔍 科研项目
- 2025.01 - 2028.12, 人机混驾环境下自主代客泊车的云控调度研究, 国家自然科学基金面上项目(52472352), 主持.
- 2022.01 - 2024.12, 城市路网停车寻位行为与交通状态演化的映射机理研究, 国家自然科学基金青年科学基金项目(52102383), 主持.
- 2025.01 - 2025.12, 新时期交通与运载工程学科发展战略研究, 国家自然科学基金专项项目(52442213), 骨干.
- 2021.12 - 2024.11, 集装箱疏运车辆港区作业和编队自动驾驶关键技术与系统研发(子课题:面向港区和疏运道路的车路协同超视距感知与定位增强技术), 国家重点研发计划(2021YFB1600403), 主持.
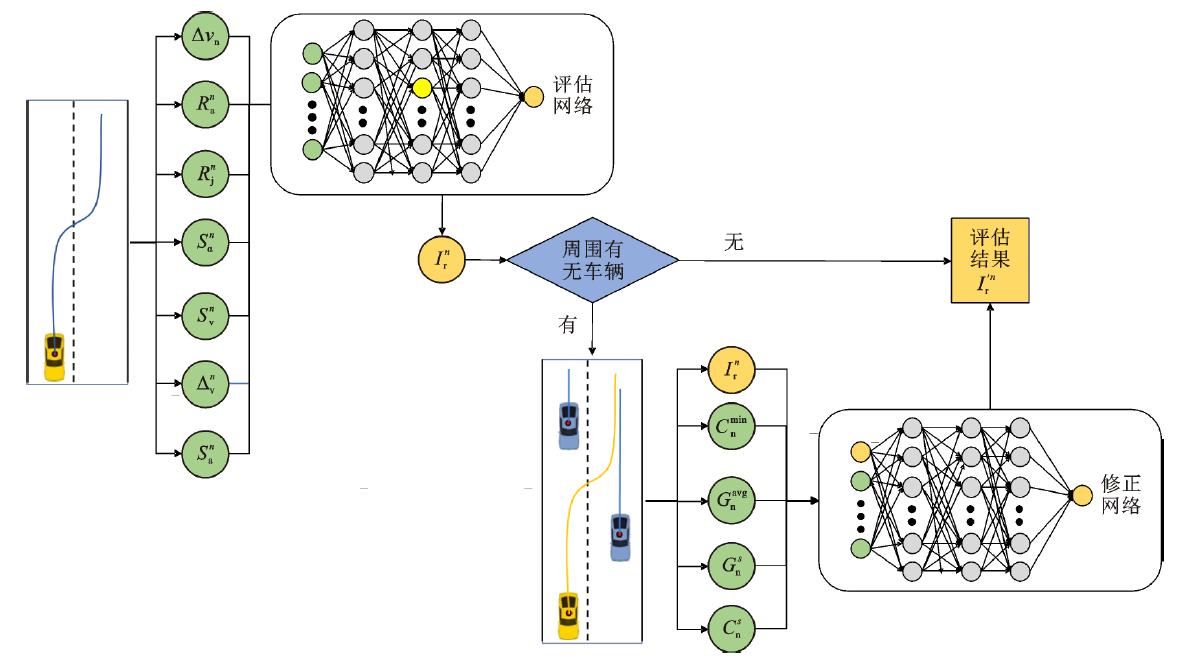
- 2020.11 - 2024.10, 可信可解释的人机共驾混合智能决策与在线评估, 科技创新2030“新一代人工智能”重大项目(2020AAA0108101), 骨干.
- 2023.01 - 2024.03, 自动代客泊车环境下停车系统调度建模与优化, 中国博士后科学基金特别资助项目(2023T160487), 主持.
- 2023.03 - 2024.02, 车路一体智能网联交通技术发展现状与演进趋势研究, 上海市科技创新行动计划项目(23692106300), 主持.
- 2024.12 - 2027.11, 车路云一体化架构下自主泊车路车融合增强与运行优化研究, 上海市青年科技启明星项目(24QA2709600), 主持.
- 2021.01 - 2025.12, 基于车路系统全息信息环境的自动驾驶群智协同关键技术研究, 上海市教育委员会科研创新计划自然科学重大项目(2021-01-07-00-07-E00092), 骨干.
- 2024.09 - 2026.08, 基于车路云一体化的自主泊车运控系统(智能停车场景), 嘉定区科技创新揭榜挂帅项目(成果转化类), 主持.
📰 新闻动态
近日,上海市科学技术委员会公示了2024年度上海市“科技创新行动计划”青年科技启明星计划(A类)立项项目名单。同济大学交通学院赵聪副教授申报的《车路云一体化架构下自主泊车路车融合增强与运行优化研究》成功入选。
项目瞄准“停车难”痛点,以车路云一体化破解自主泊车落地瓶颈。针对停车空间半结构化、弱规则化、高密集交互等复杂特征,本项目拟采用车路云一体化技术路径,重点攻克自主泊车失效风险辨识与路辅靶向增强两大关键难题,为特定场景自动驾驶应用提供可复制、可推广的方案。上海市青年科技启明星计划(A类)是上海市科委最具影响力的青年人才项目之一,赵聪此次入选,标志着其在前沿交叉领域的创新能力和工程转化成果获得高度认可。
近日,按照中国科协相关文件要求,中国公路学会在公路交通行业内开展青年人才托举工程遴选工作,课题组赵聪副教授以复评第一的身份顺利入选第八届中国科协青年人才托举工程中国科协资助名额。
“青年人才托举工程”是中国科协设立的国家级青年人才计划,采用以奖代补、稳定支持的方式,连续三年资助,大力扶持有较大创新能力和发展潜力的32岁以下青年科技人才,帮助他们在创造力黄金时期做出突出业绩,成长为国家主要科技领域高层次领军人才和高水平创新团队的重要后备力量。
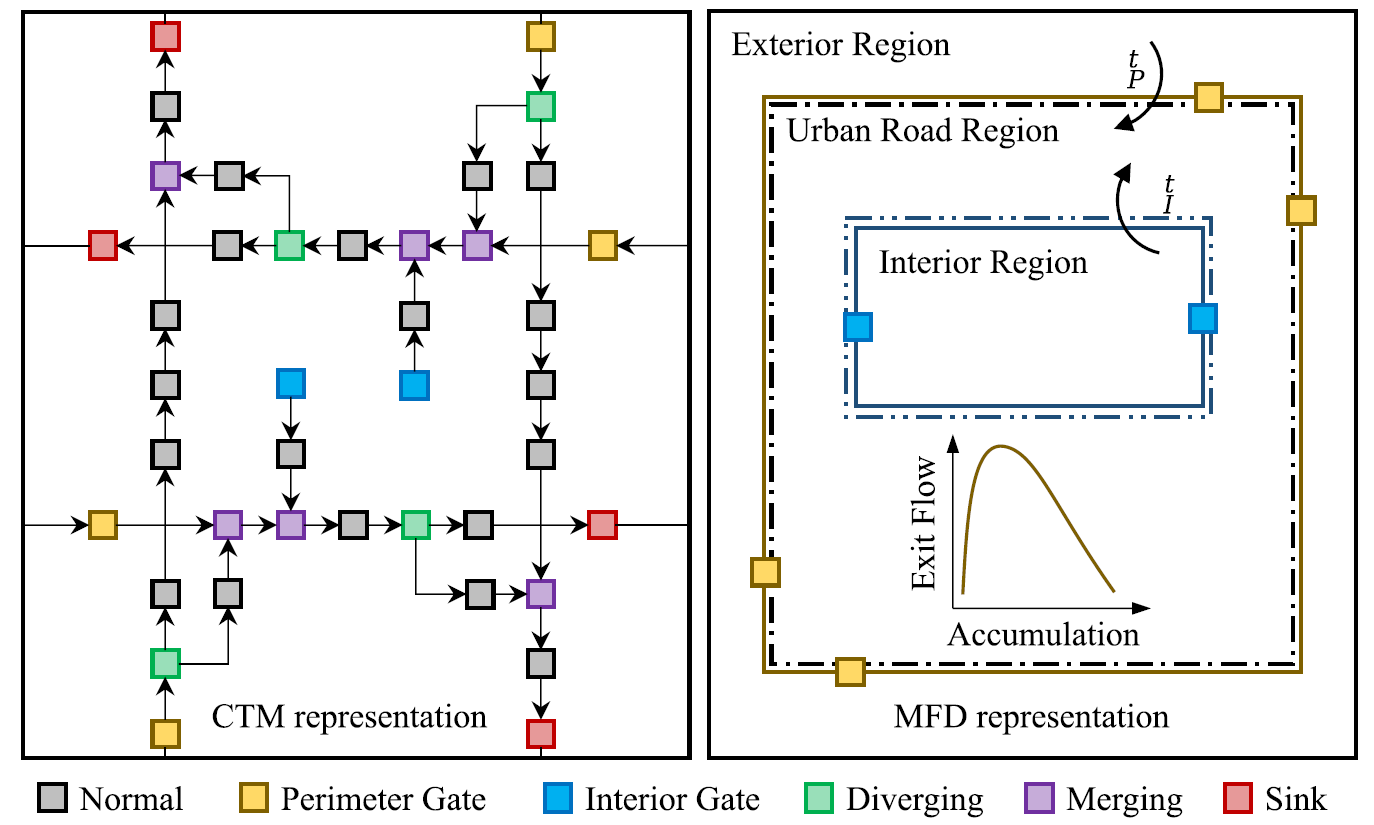
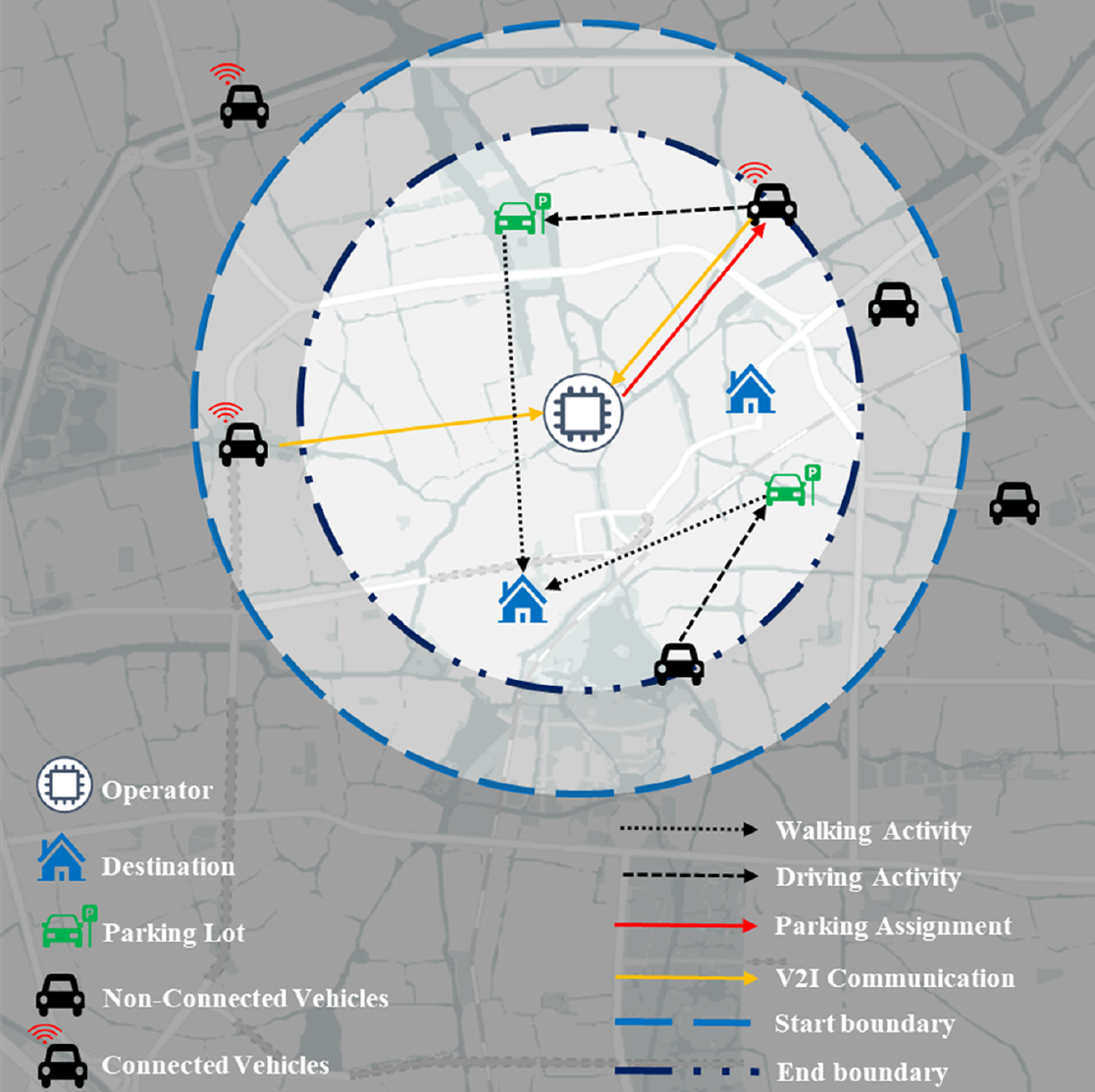
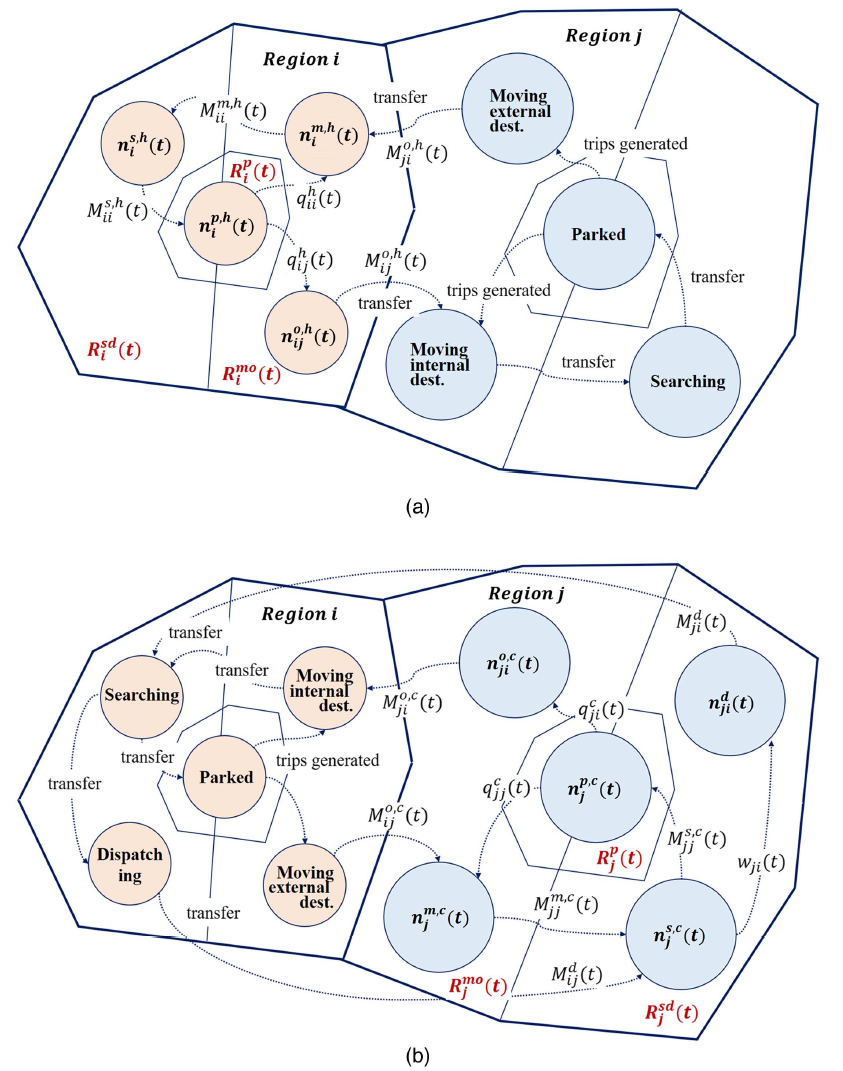
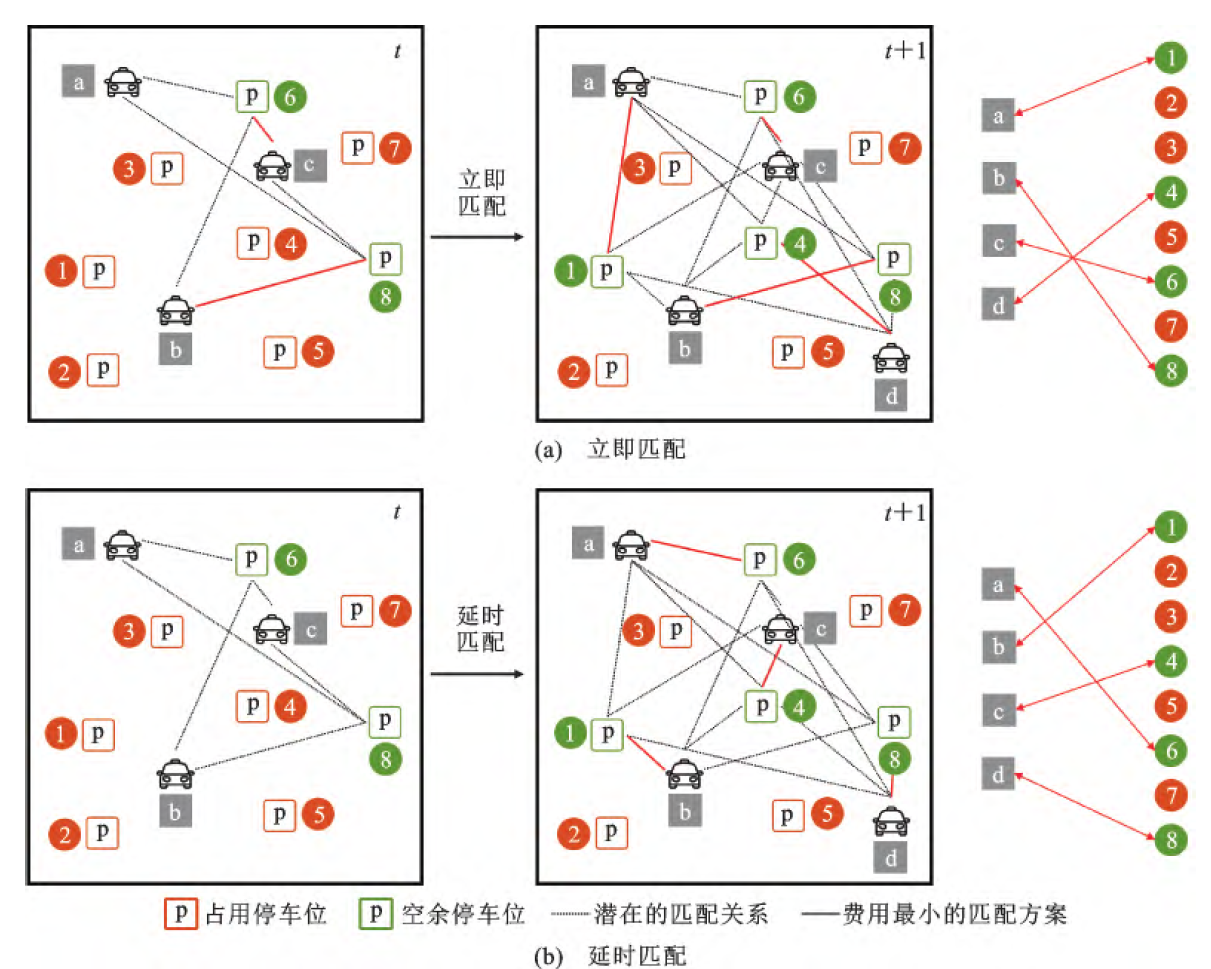
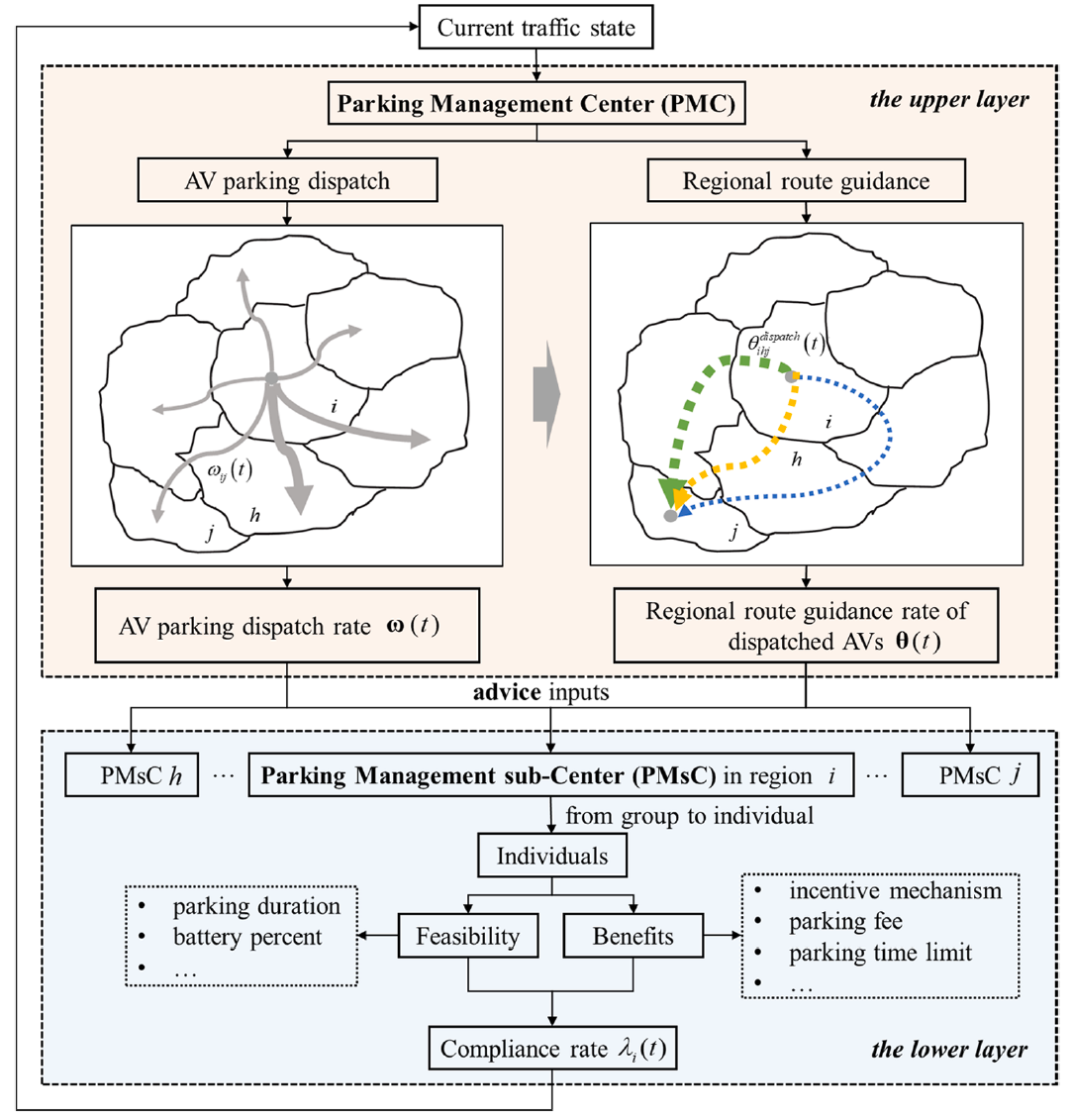
根据基本科学指标库 ESI(Essential Science Indicators)最新统计数据,以课题组赵聪副教授为第一作者,杜豫川教授为通讯作者,同济大学道路与交通工程教育部重点实验室为第一完成单位,发表在智能交通领域顶级国际期刊 Transportation Research Part C: Emerging Technologies(中科院一区,Top 期刊,IF: 9.022)的论文“Macroscopic modeling and dynamic control of on-street cruising-for-parking of autonomous vehicles in a multi-region urban road network”(2021年,128卷)入选工程领域 ESI 全球 TOP 1.0% 高被引论文和研究前沿核心论文。
该研究聚焦城市“停车难”痛点问题,面向汽车智能化、网联化发展趋势,揭示了自动驾驶环境下路网静态停车与动态交通的交互影响规律,提出了中心化网联云调度的城市停车管理新范式。为实现区域供需动态平衡,减少停车巡游,论文提出了“区域间总量控制-区域内动态调度-车位级智能匹配”的三层调度框架,构建了动静一体的宏观交通分析模型,拓展了现有的理论体系。研究成果为智能网联环境下的城市停车管理提供了决策支持工具,具有广阔的应用前景。
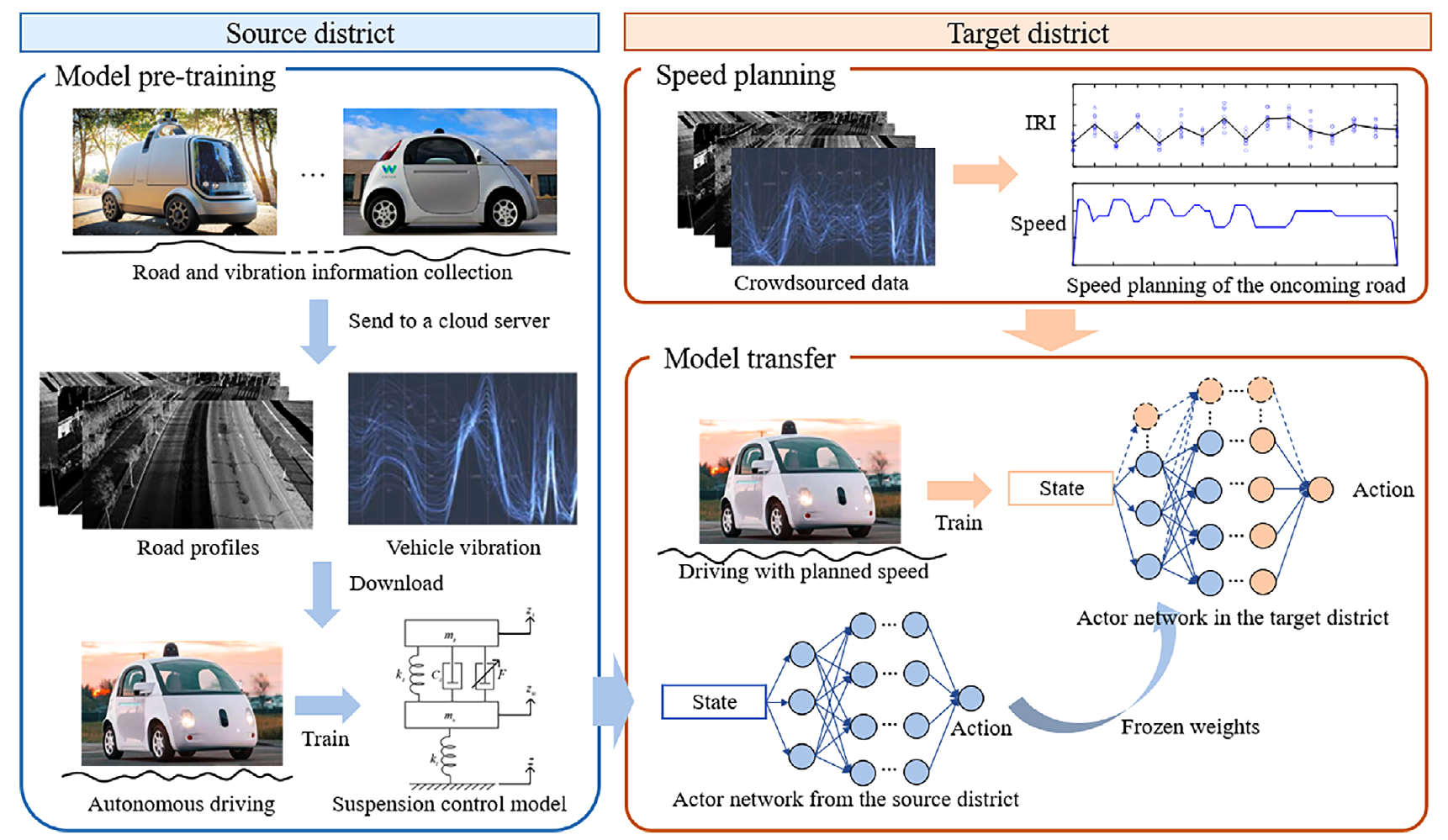
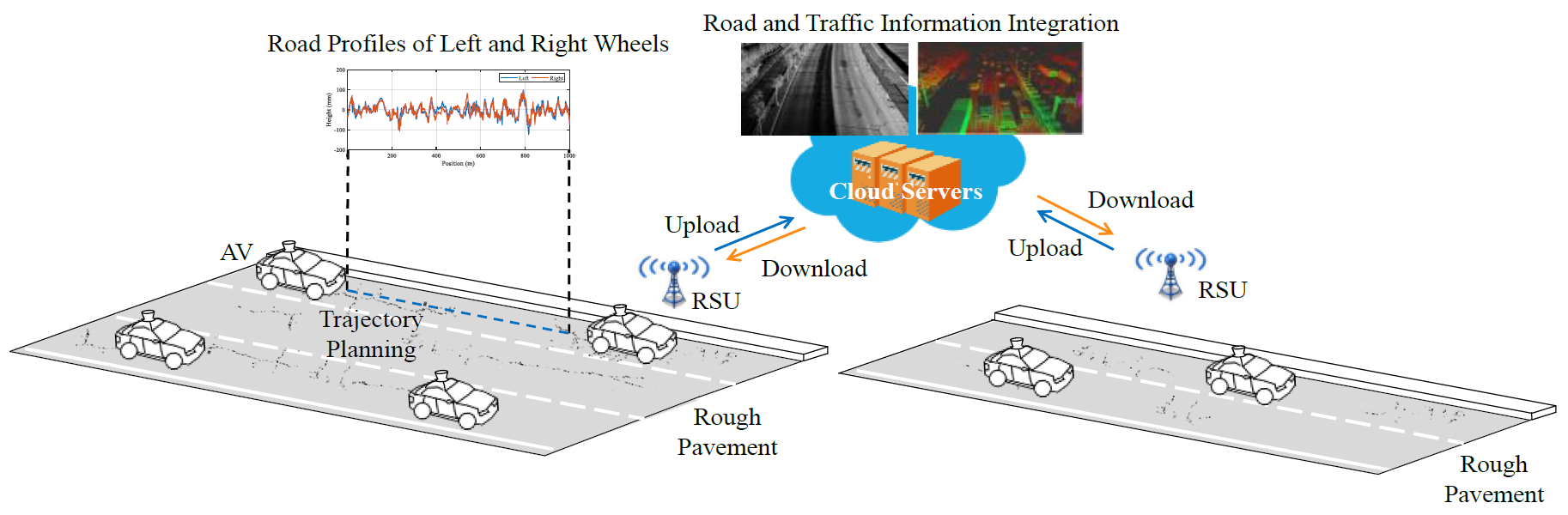
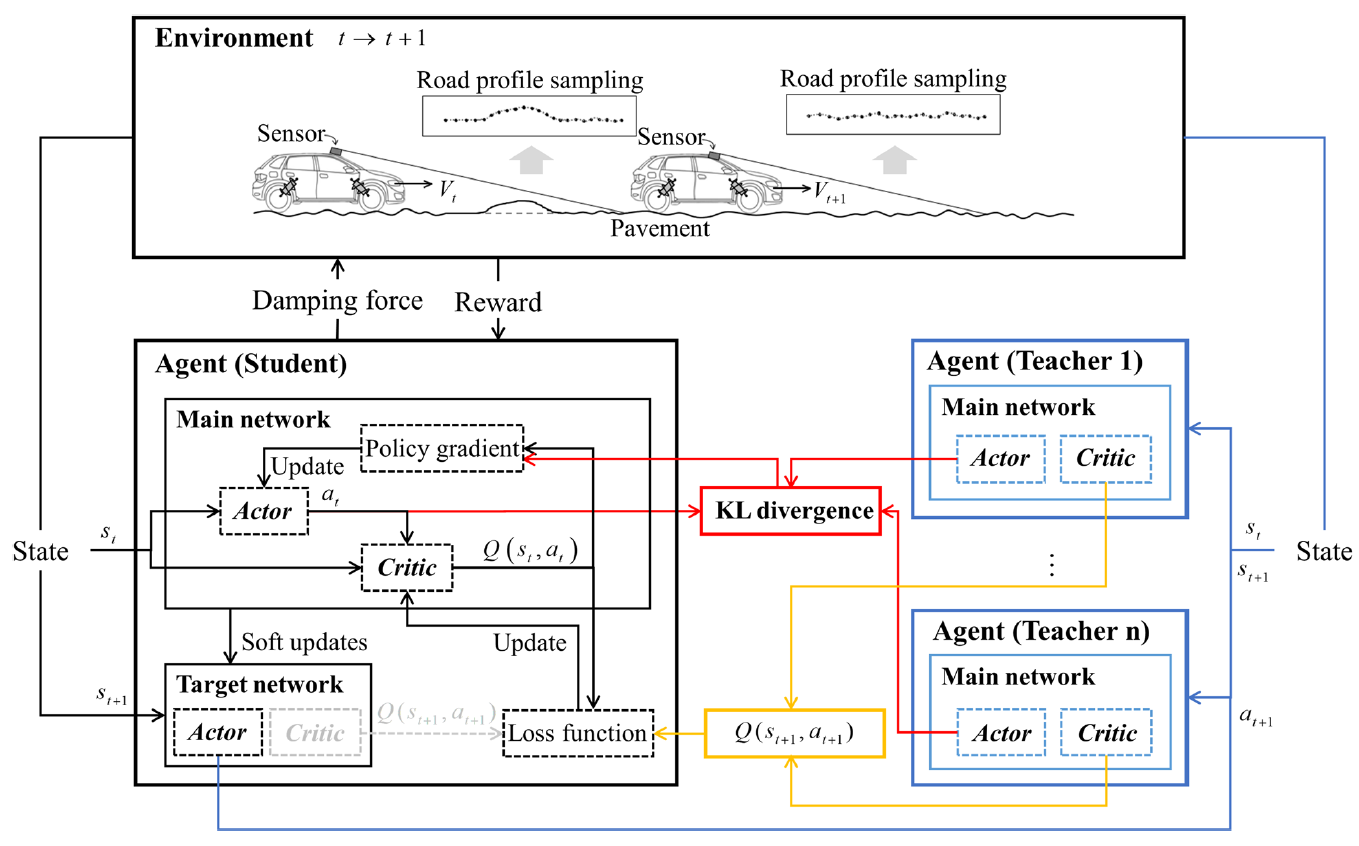
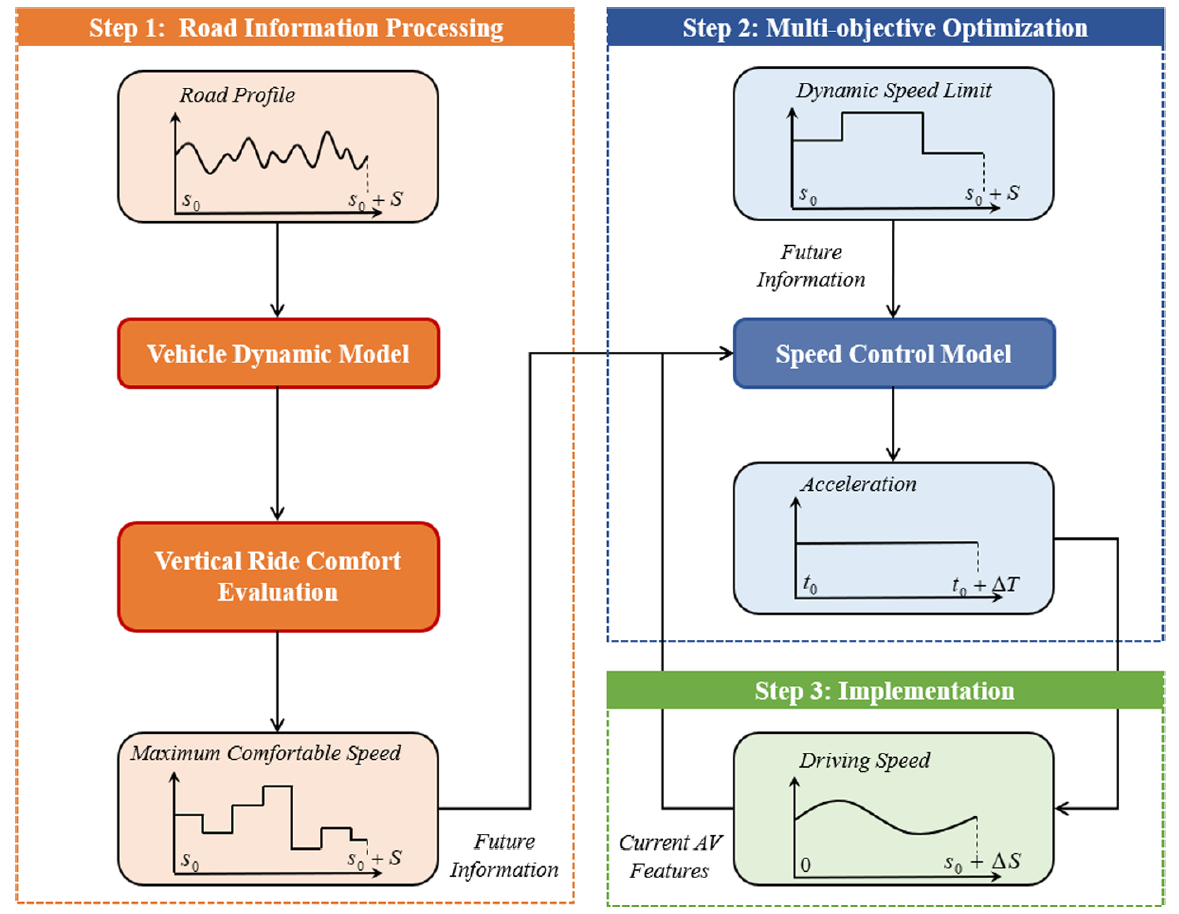
根据基本科学指标库 ESI 最新统计数据,以同济大学智能交通新兴计算与感知研究课题组杜豫川教授为第一作者,赵聪副教授为通讯作者,同济大学道路与交通工程教育部重点实验室为第一完成单位,发表在交通运输领域顶级国际期刊 Transportation Research Part C: Emerging Technologies(中科院一区,Top 期刊,IF: 9.022)的论文“Comfortable and energy-efficient speed control of autonomous vehicles on rough pavements using deep reinforcement learning”(2022年,134卷)入选工程领域 ESI 全球 TOP 1.0% 高被引论文。
该研究面向车路协同自动驾驶环境,为提升车辆行驶的舒适性和节能性,率先利用海量路面数据和新兴深度强化学习算法,构建了一种高效的自动驾驶智能决策控制框架。研究创新性提出“最大舒适速度”概念,以表征自动驾驶车辆前方复杂的路面环境信息;进而利用深度强化学习方法构建速度决策模型,使用海量的实证路面数据和高可信的车路交互仿真环境训练深度神经网络参数。实验结果证明,相比于传统的模型预测控制方法,该模型在舒适度、节能和实时计算效率上分别提升了 8.22%、24.37% 和 94.38%,为车路协同环境下的速度决策控制提供了新思路。
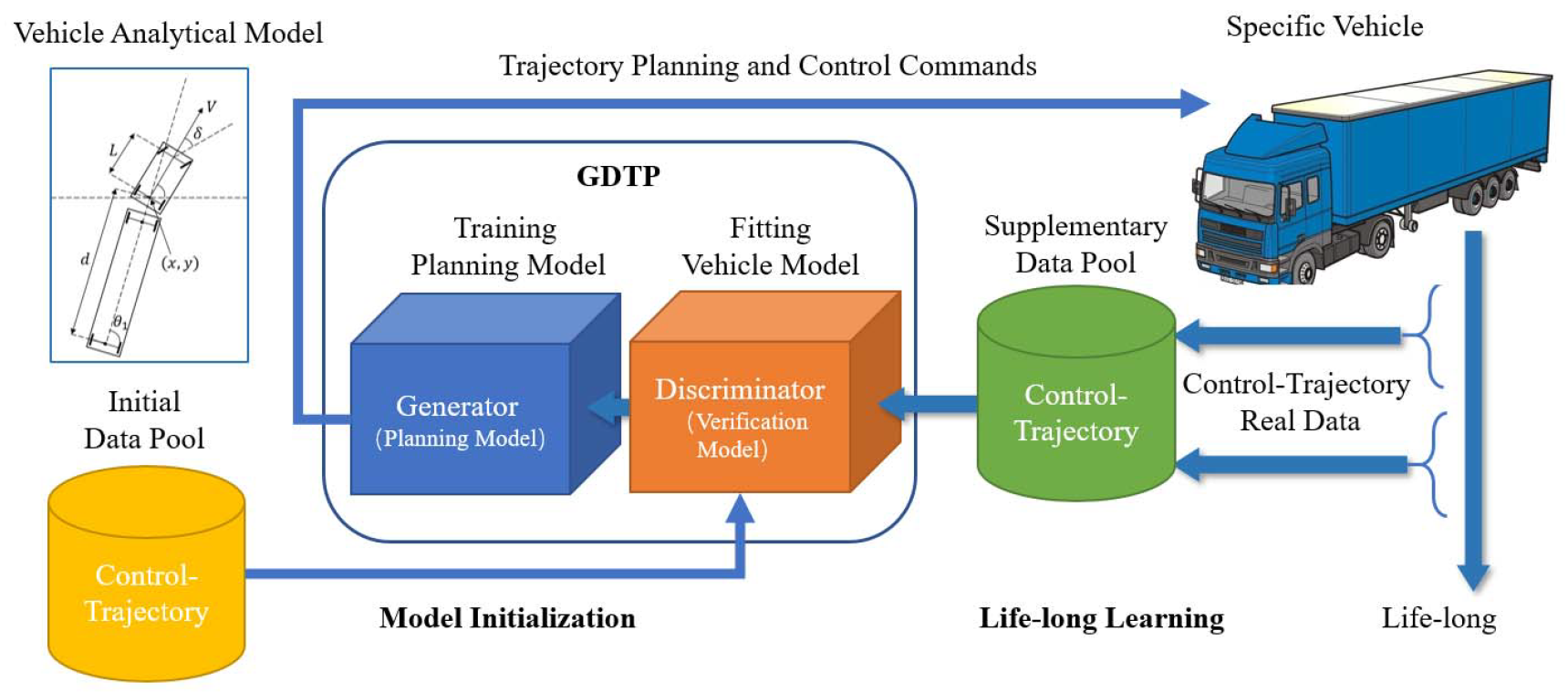
根据基本科学指标库ESI(Essential Science Indicators)的最新统计数据,以课题组赵聪副教授为第一作者,杜豫川教授为通讯作者,同济大学道路与交通工程教育部重点实验室为第一完成单位,发表在智能交通领域顶级国际期刊IEEE Transactions on Intelligent Transportation Systems(中科院一区,Top期刊,影响因子为8.4)的论文“A Novel Direct Trajectory Planning Approach Based on Generative Adversarial Networks and Rapidly-Exploring Random Tree”(2022年,23卷,10期)入选工程(Engineering)领域ESI全球TOP 1.0%高被引论文。
该研究面向自动驾驶车辆在复杂多障碍物场景下的高精度轨迹规划需求,针对现有方法在轨迹可行性与长阶段计算效率方面的局限,提出了一种基于生成对抗网络(GAN)与快速探索随机树(RRT)的直接轨迹规划(DTP)终身学习框架。研究团队构建了轻量级GDTP模型,以表征车辆初始/目标状态与控制动作序列间的映射关系;进而将该模型嵌入至RRT算法中,开发了GDTP-RRT规划算法。以运动学约束复杂的牵引挂车系统为例的多场景测试表明,相比于传统的三次曲线RRT算法,该方法在保持高计算效率的同时有效提升了轨迹可行性,其位置与航向角的跟踪误差分别降低了29.1%和44.1%。研究成果为解决复杂约束下的车辆轨迹规划问题提供了有效的新思路,为高级别自动驾驶系统的落地应用提供了重要的理论依据与技术参考。
ESI是由世界著名的学术信息出版机构美国科技信息所(ISI)推出的衡量科学研究绩效、跟踪科学发展趋势的基本分析评价工具,是基于汤森路透Web of Science(SCIE/SSCI)所收录的全球11000多种学术期刊的数千万条文献记录而建立的计量分析数据库。ESI对全球所有的SCIE、SSCI库中2005年以来的论文数据进行统计,按被引频次的高低确定出衡量研究绩效的阈值;ESI高被引论文已成为当前衡量和评价国家/地区科研水平、机构学术声誉、学科水平、科学家学术影响力以及期刊学术水平的一个重要指标。ESI Top 1.0 %高被引论文是指同年度同学科领域中被引频次排名前1.0%以内的文章。
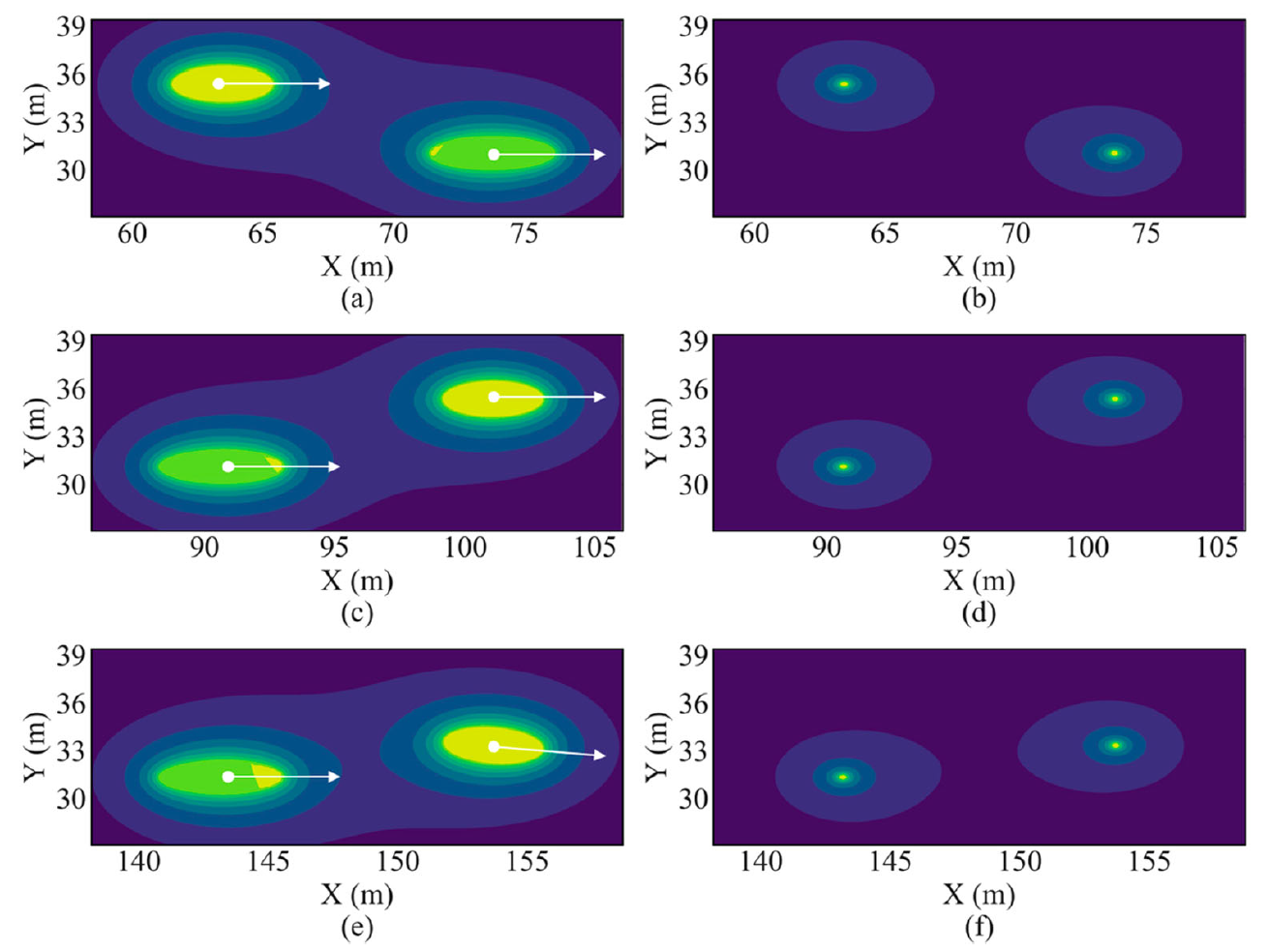
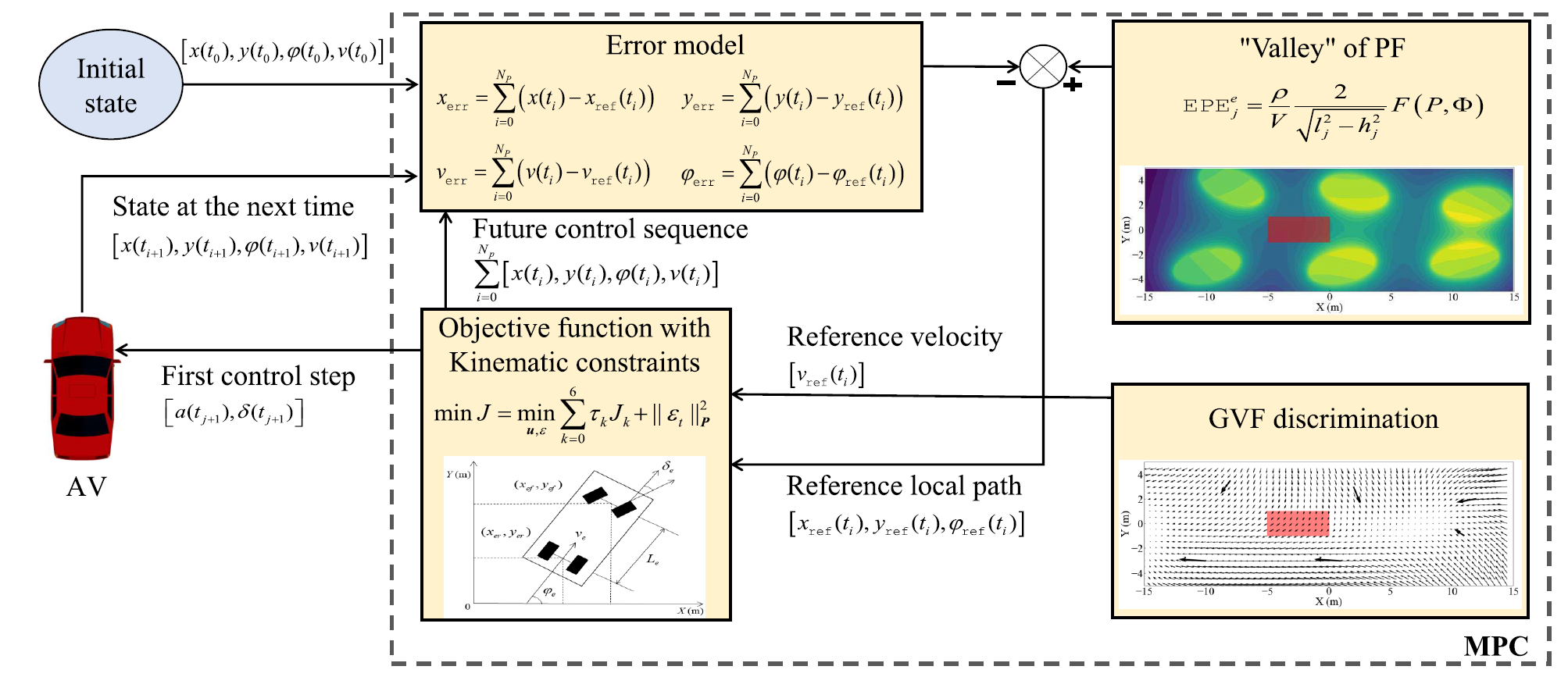
根据基本科学指标库ESI(Essential Science Indicators)的最新统计数据,以课题组暨育雄教授为第一作者,赵聪副教授为通讯作者,同济大学道路与交通工程教育部重点实验室为第一完成单位,发表在智能交通领域顶级国际期刊IEEE Transactions on Intelligent Transportation Systems(中科院一区,Top期刊,影响因子为8.4)的论文“TriPField: A 3D Potential Field Model and Its Applications to Local Path Planning of Autonomous Vehicles”(2023年,24卷,3期)入选工程(Engineering)领域ESI全球TOP 1.0%高被引论文。
该研究面向自动驾驶车辆在复杂动态障碍物场景下的局部路径规划需求,针对传统人工势场模型因各向同性及忽略目标几何特征易陷入局部最优的问题,提出了一种三维势场(TriPField)规划模型。该模型融合了椭球势场与高斯速度场(GVF):在椭球坐标系下通过求解拉普拉斯方程表征周边车辆的三维轮廓与姿态;并引入非参数GVF捕捉多车动态交互特征以指导速度规划;最后结合模型预测控制(MPC),构建了满足底层运动学约束的规划框架。在主动变道、匝道汇入和跟车等典型场景的实验表明,与传统势场规划器相比,该方法将局部路径长度、路径粗糙度、加速度变化率及MPC跟踪误差分别降低了10%、11%、24%和20%,并在周边车辆异常驾驶时仍能实现有效避障。该成果为复杂密集交通流下的自动驾驶高精度运动规划提供了可靠的理论依据与工程参考。
ESI是由世界著名的学术信息出版机构美国科技信息所(ISI)推出的衡量科学研究绩效、跟踪科学发展趋势的基本分析评价工具,是基于汤森路透Web of Science(SCIE/SSCI)所收录的全球11000多种学术期刊的数千万条文献记录而建立的计量分析数据库。ESI对全球所有的SCIE、SSCI库中2005年以来的论文数据进行统计,按被引频次的高低确定出衡量研究绩效的阈值;ESI高被引论文已成为当前衡量和评价国家/地区科研水平、机构学术声誉、学科水平、科学家学术影响力以及期刊学术水平的一个重要指标。ESI Top 1.0 %高被引论文是指同年度同学科领域中被引频次排名前1.0%以内的文章。
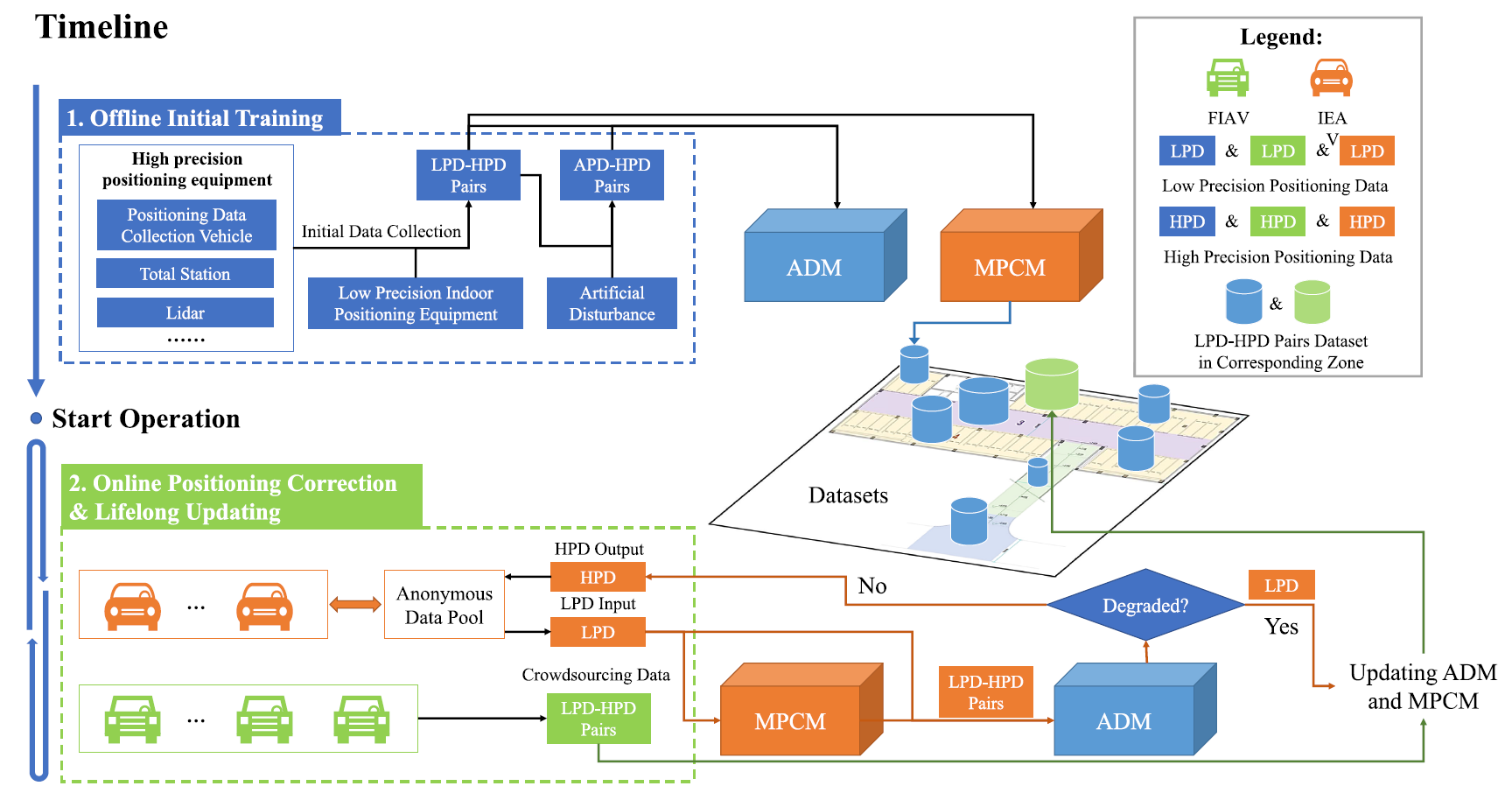
根据基本科学指标库ESI(Essential Science Indicators)的最新统计数据,以课题组赵聪副教授为第一作者,杜豫川教授为通讯作者,同济大学道路与交通工程教育部重点实验室为第一完成单位,发表在智能交通领域顶级国际期刊IEEE Transactions on Intelligent Transportation Systems(中科院一区,Top期刊,影响因子8.4)的论文“Data-Driven Indoor Positioning Correction for Infrastructure-Enabled Autonomous Driving Systems: A Lifelong Framework”(2023年,24卷,4期)入选工程(Engineering)领域ESI全球TOP 1.0%高被引论文。
该研究面向智能车库中自动代客泊车的高精度定位需求,针对无线室内定位技术在环境动态变化及长期运行下性能退化的问题,提出了一种数据驱动的终身学习室内定位误差校正框架。研究利用高配自动驾驶车辆的众包数据,构建了地图辅助的深度学习定位校正模型。该模型融合CoordConv、长短期记忆网络(LSTM)与Transformer以提取误差时空特征,并嵌入局部栅格地图生成器学习环境干扰机制;同时,开发了异常检测模型监控系统退化并引导更新,保障框架的终身稳定性。真实地下停车场的测试表明,该系统能在动态复杂的环境中保持高精度校正,将室内定位误差与车辆路径跟踪误差分别降低了60%和40%。该成果有效缓解了无线定位系统长期精度衰减的问题,为基础设施赋能的自动驾驶规模化应用提供了可靠的技术支撑。
ESI是由世界著名的学术信息出版机构美国科技信息所(ISI)推出的衡量科学研究绩效、跟踪科学发展趋势的基本分析评价工具,是基于汤森路透Web of Science(SCIE/SSCI)所收录的全球11000多种学术期刊的数千万条文献记录而建立的计量分析数据库。ESI对全球所有的SCIE、SSCI库中2005年以来的论文数据进行统计,按被引频次的高低确定出衡量研究绩效的阈值;ESI高被引论文已成为当前衡量和评价国家/地区科研水平、机构学术声誉、学科水平、科学家学术影响力以及期刊学术水平的一个重要指标。ESI Top 1.0 %高被引论文是指同年度同学科领域中被引频次排名前1.0%以内的文章。
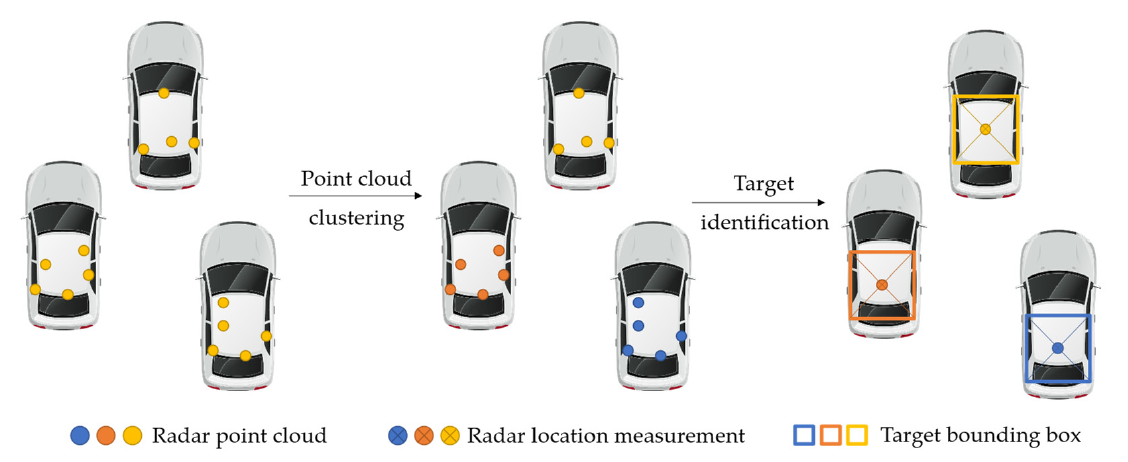
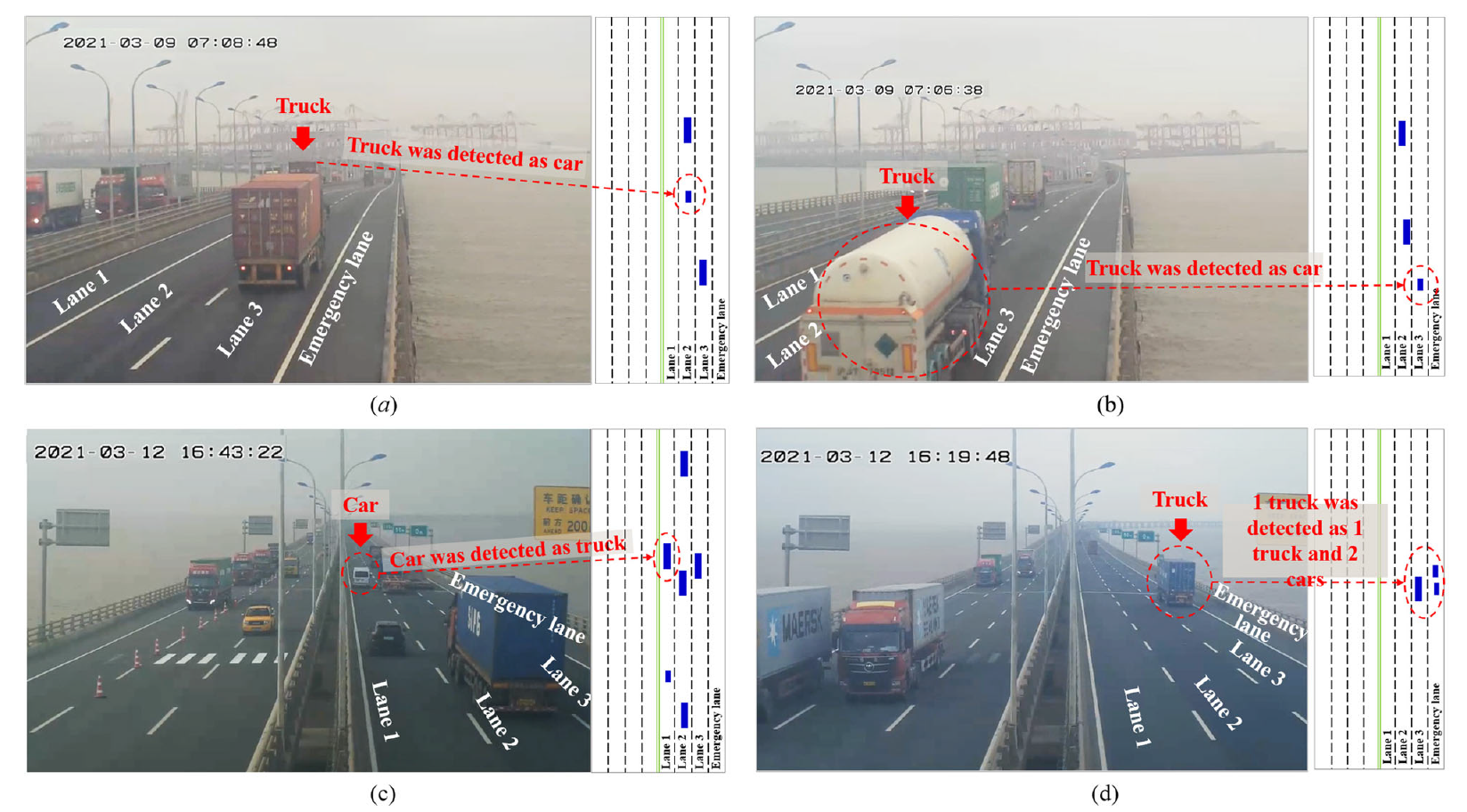
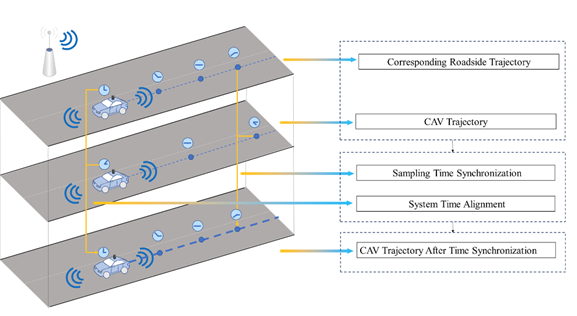
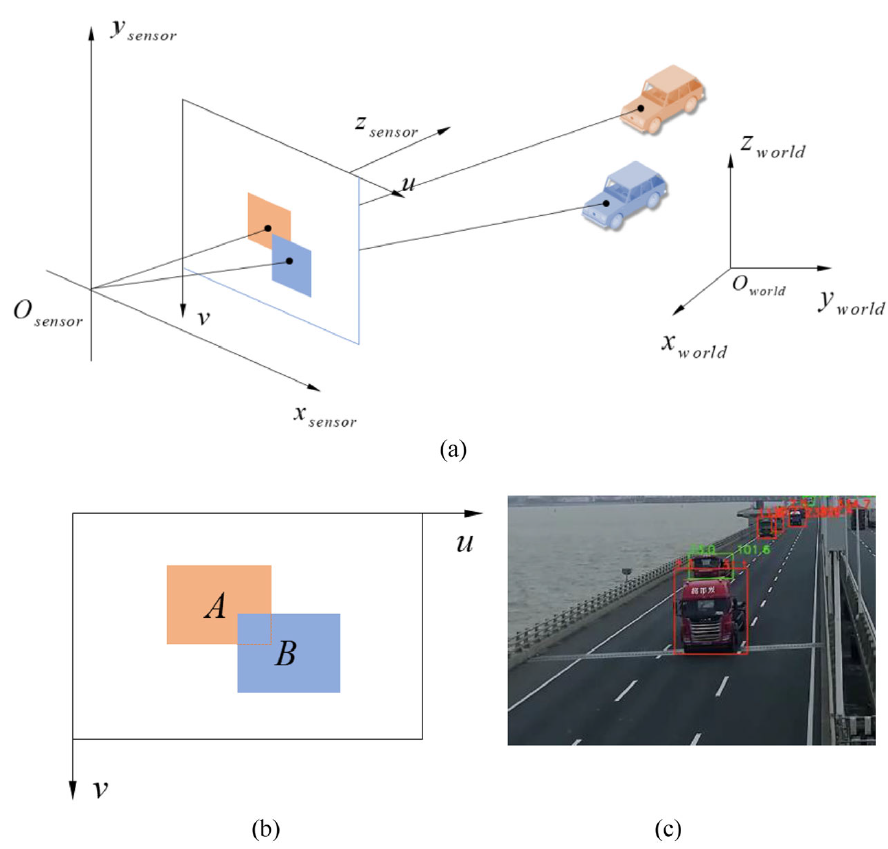
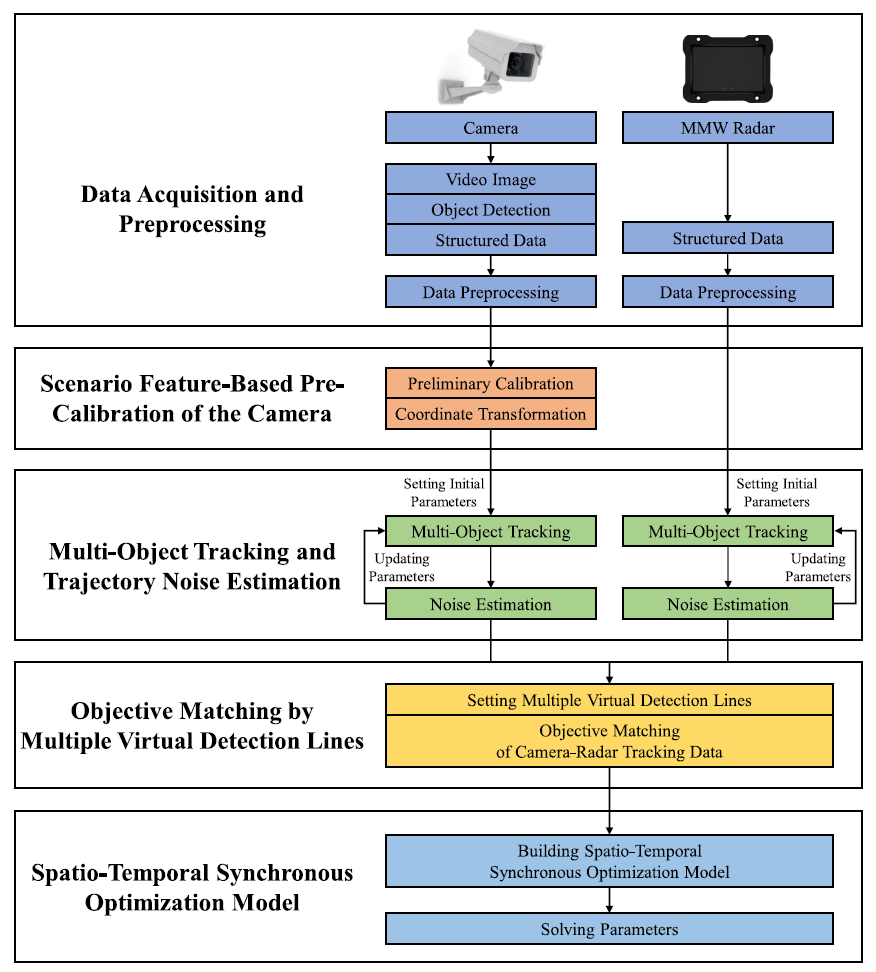
根据基本科学指标库ESI(Essential Science Indicators)的最新统计数据,以课题组杜豫川教授为第一作者,赵聪副教授为通讯作者,同济大学道路与交通工程教育部重点实验室为第一完成单位,发表在智能交通领域顶级国际期刊IEEE Transactions on Intelligent Transportation Systems(中科院一区,Top期刊,影响因子为8.4)的论文“A Novel Spatio-Temporal Synchronization Method of Roadside Asynchronous MMW Radar-Camera for Sensor Fusion”(2022年,23卷,11期)入选工程(Engineering)领域ESI全球TOP 1.0%高被引论文,同时入选ESI全球TOP 0.1%热点论文。
该研究面向车路协同系统中的感知智能需求,针对路侧毫米波雷达与相机在多源融合过程中由于采样频率不一致及时间戳不同步导致的感知精度瓶颈,提出了一套全新的路侧异步传感器时空同步方案。研究创新性地构建了“由粗到精”的时间同步机制,并结合单应矩阵实现了高精度的空间对齐。实验结果证明,该方法实现的时间偏移估计平均误差仅为4.3 ms。相比于目前广泛使用的最近邻匹配方法,该方法在目标距离维度的均方根误差降低了43.6%,在速度维度的RMSE降低了52.8%。研究成果为路侧多源传感器融合感知提供了新思路,为复杂交通场景下的高精度环境监测与车路协同应用提供了可靠的技术支撑,具有广阔的工程应用前景。
ESI是由世界著名的学术信息出版机构美国科技信息所(ISI)推出的衡量科学研究绩效、跟踪科学发展趋势的基本分析评价工具,是基于汤森路透Web of Science(SCIE/SSCI)所收录的全球11000多种学术期刊的数千万条文献记录而建立的计量分析数据库。ESI高被引论文与热点论文是国际公认的衡量学术影响力的核心指标,其中ESI Top 0.1%热点论文代表了相应领域最具前沿性和影响力的顶尖研究成果。
📝 发表论文
IEEE Transactions on Intelligent Transportation Systems
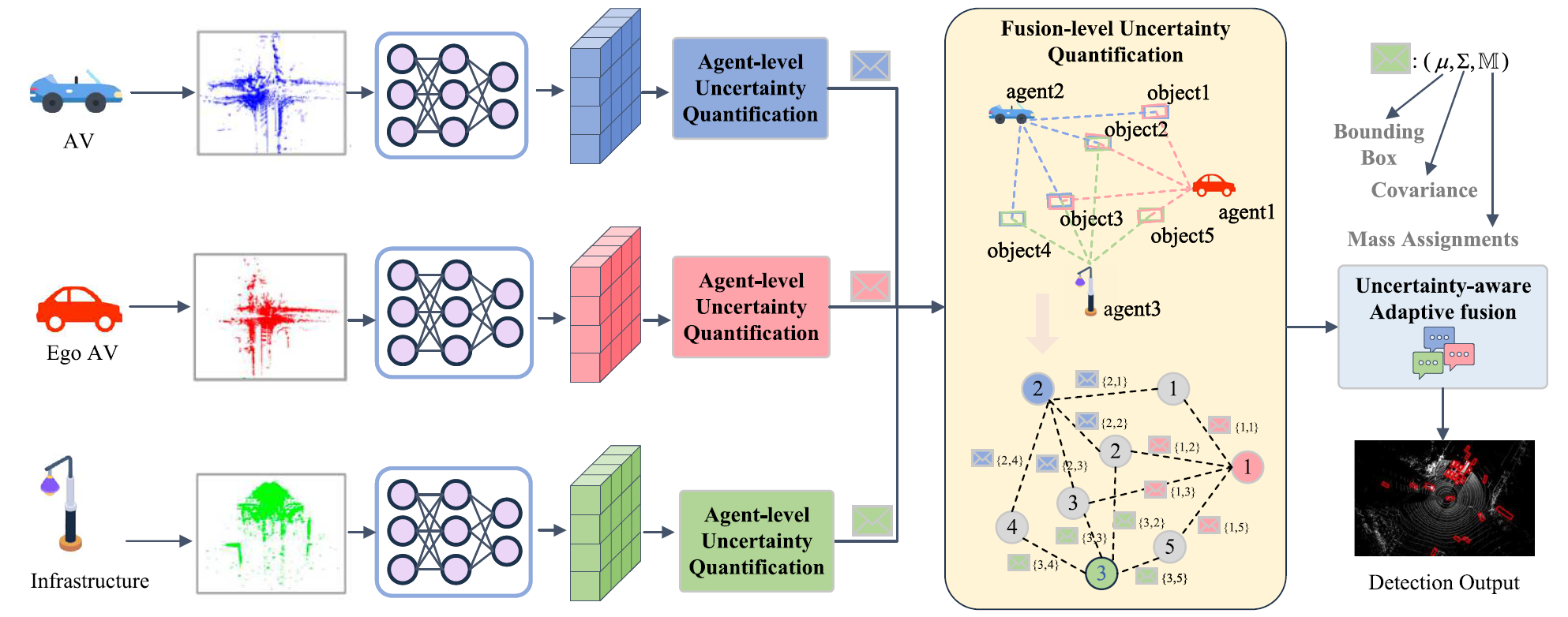
🔥New! BELT-Fusion: Bayesian Evidential Late Fusion for Trustworthy V2X Perception
Zhiguo Zhao, Cong Zhao*, Kun Chen, Yuxiong Ji*, Yuchuan Du
IEEE Transactions on Intelligent Transportation Systems
Cong Zhao, Tianyi Ji*, Andi Song, Yuxiong Ji, Chao Wang, Yuchuan Du*
IEEE Transactions on Intelligent Transportation Systems
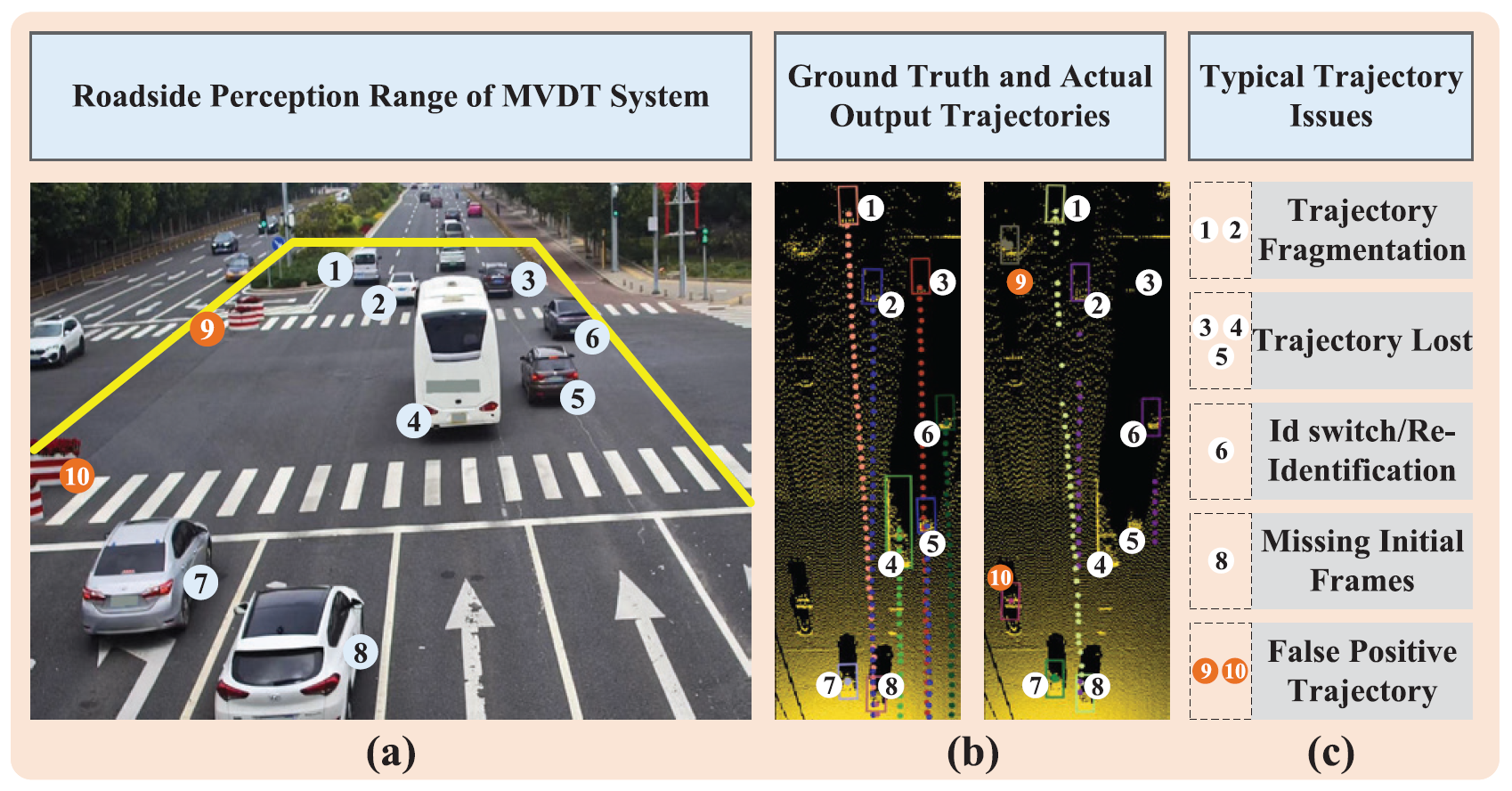
🔥New! Uncertainty-aware multi-vehicle detection and tracking using roadside 3D point clouds
Kun Chen, Cong Zhao*, Yuxiong Ji*, Chao Wang, Yuchuan Du
IEEE Transactions on Intelligent Transportation Systems
Zimu Zeng, Cong Zhao*, Shiyu Wang, Yuxiong Ji, Chao Wang, Yuchuan Du
Transportmetrica A: Transport Science
🔥New! A novel ellipsoidal safety potential field model for quantifying driving risk
Cailin Lei, Cong Zhao*, Kun Chen, Yuxiong Ji*, Yuchuan Du
Computer-Aided Civil and Infrastructure Engineering
Jing Chen, Cong Zhao*, Kun Gao*, Yuxiong Ji, Yuchuan Du
IEEE Transactions on Intelligent Transportation Systems
Cong Zhao, Delong Ding, Cailin Lei*, Shiyu Wang, Yuxiong Ji*, Yuchuan Du
IEEE Transactions on Intelligent Transportation Systems
Yuxiong Ji, Zhongke Xu, Cong Zhao*, Kun Chen, Yuchuan Du
International Journal of Transportation Science and Technology
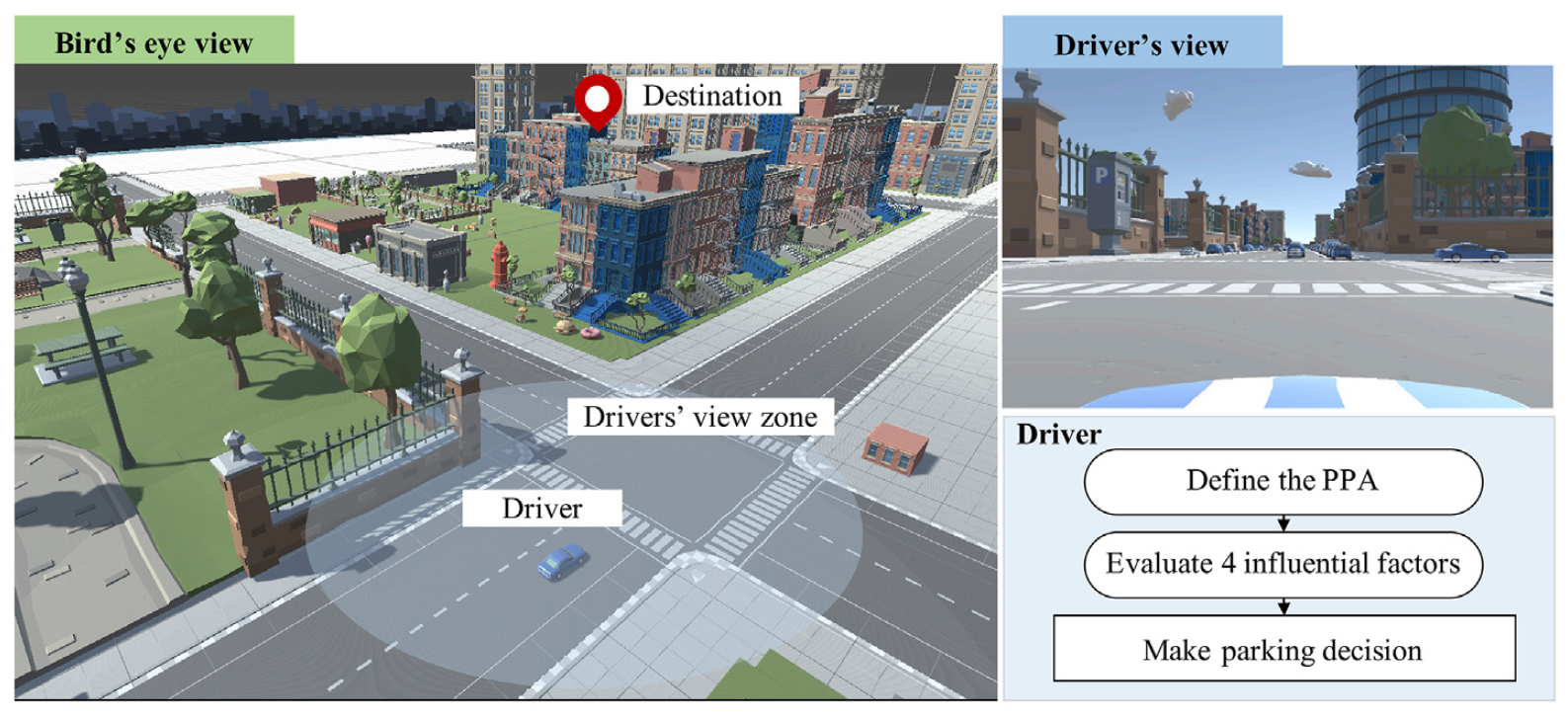
Learning to search for parking like a human: A deep inverse reinforcement learning approach
Shiyu Wang, Haiyan Yang, Yijia Tang, Jing Chen, Cong Zhao*, Yuchuan Du
IET Intelligent Transport Systems
Chuna Wu, Jing Chen*, Jinqiang Yao, Tianyi Chen, Jing Cao, Cong Zhao*
Transportation Research Part B: Methodological
Xinghua Li, Xinyuan Zhang, Xinwu Qian, Cong Zhao, Yuntao Guo*, Srinivas Peeta
Expert Systems with Applications
Tianyi Ji, Cong Zhao*, Yuxiong Ji, Yuchuan Du
Knowledge-Based Systems
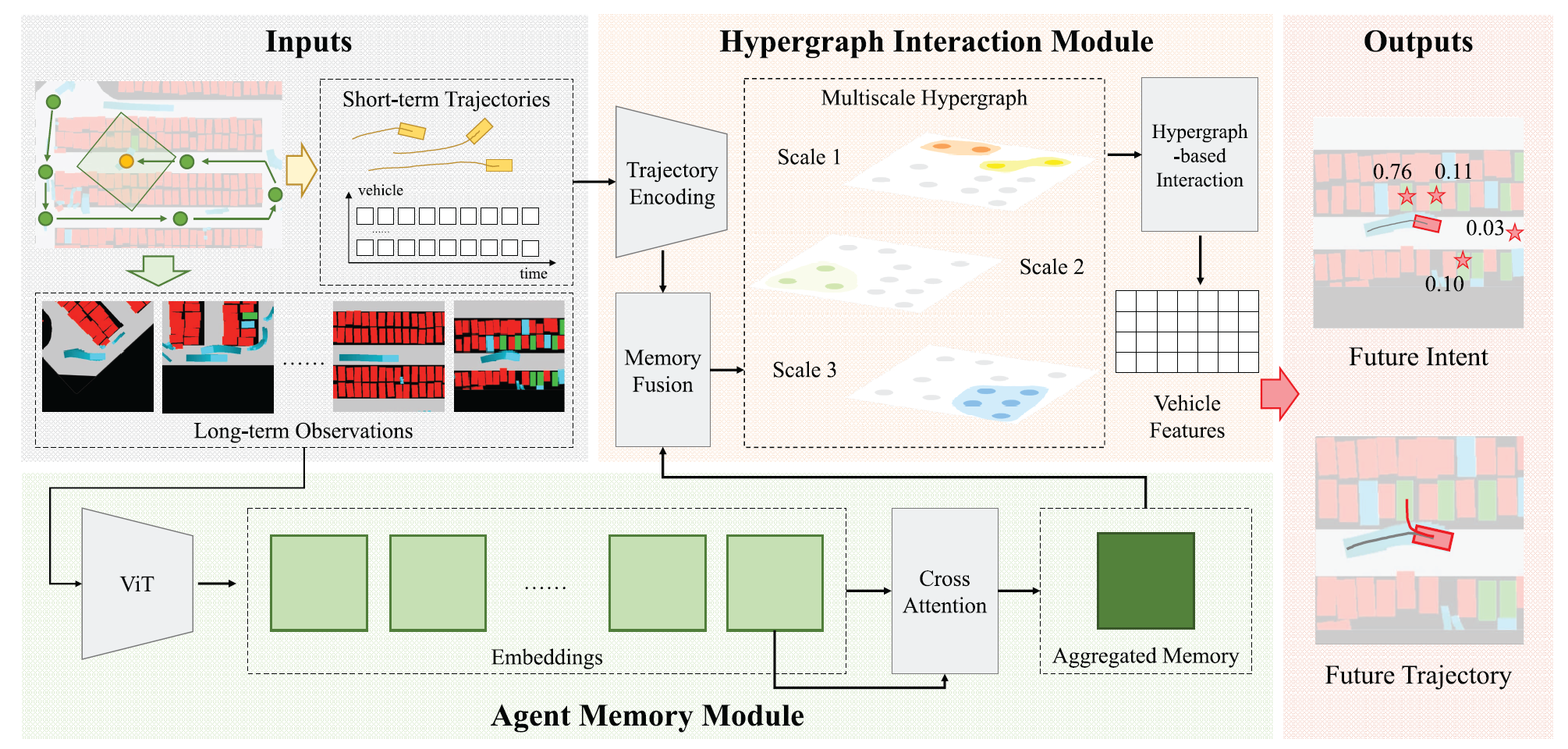
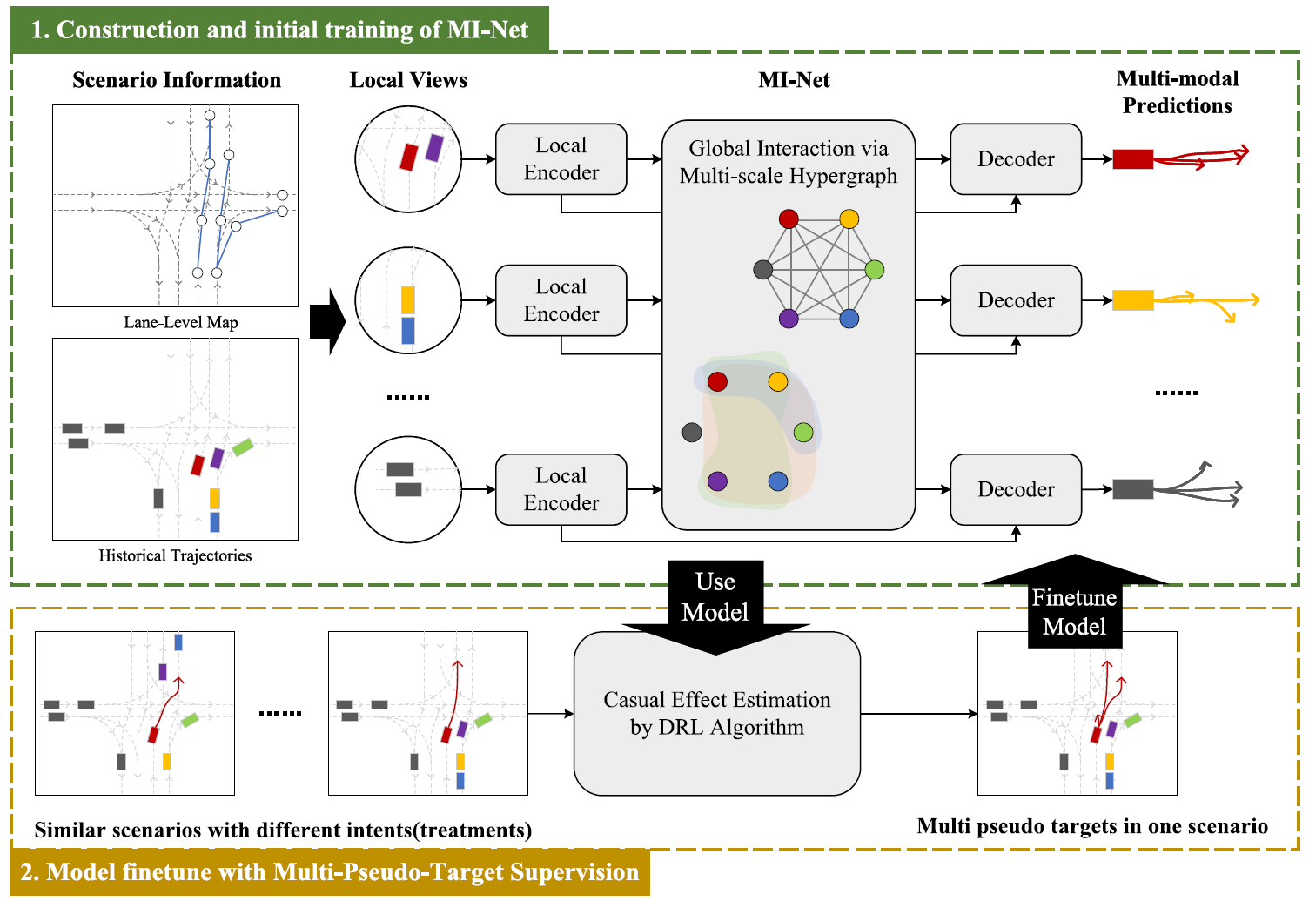
Multi-modal trajectory forecasting with Multi-scale Interactions and Multi-pseudo-target Supervision
Cong Zhao, Andi Song, Zimu Zeng, Yuxiong Ji*, Yuchuan Du
IEEE Transactions on Intelligent Transportation Systems
Cong Zhao, Delong Ding, Yupeng Shi, Yuxiong Ji*, Yuchuan Du*
IEEE Transactions on Intelligent Transportation Systems
Cong Zhao, Yupeng Shi, Yuchuan Du*, Shengchuan Jiang, Yuxiong Ji, Xiangmo Zhao
👉 Click to view Past Publications (点击查看往期论文)
Tunnelling and Underground Space Technology
Shanchuan Yu, Cong Zhao*, Lang Song, Yishun Li, Yuchuan Du
IEEE Transactions on Intelligent Transportation Systems
Cong Zhao, Andi Song, Yifan Zhu, Shengchuan Jiang, Feixiong Liao, Yuchuan Du*
IEEE Transactions on Intelligent Transportation Systems
Yuxiong Ji, Lantao Ni, Cong Zhao*, Cailin Lei, Yuchuan Du, Wenshuo Wang
International Journal of Environmental Research and Public Health
Jing Chen, Cong Zhao*, Shengchuan Jiang, Xinyuan Zhang, Zhongxin Li, Yuchuan Du
International Journal of Environmental Research and Public Health
Cong Zhao, Delong Ding, Zhouyang Du, Yupeng Shi, Guimin Su, Shanchuan Yu*
Computer-Aided Civil and Infrastructure Engineering
Yuchuan Du, Jing Chen, Cong Zhao*, Feixiong Liao, Meixin Zhu
IET Intelligent Transport Systems
Identifying and correcting the errors of vehicle trajectories from roadside millimetre‐wave radars
Cailin Lei, Cong Zhao, Yuxiong Ji*, Yu Shen, Yuchuan Du
Transportation Research Part C: Emerging Technologies
Cong Zhao, Andi Song, Yuchuan Du*, Biao Yang
Computers and Electrical Engineering
Yuchuan Du, Yupeng Shi, Cong Zhao*, Zhouyang Du, Yuxiong Ji
IET Intelligent Transport Systems
Yuchuan Du, Fengqi Wang, Cong Zhao*, Yifan Zhu, Yuxiong Ji
IEEE Transactions on Intelligent Transportation Systems
Cong Zhao, Yifan Zhu, Yuchuan Du*, Feixiong Liao, Ching-Yao Chan
Transportation Research Part C: Emerging Technologies
Xinyuan Zhang, Cong Zhao*, Feixiong Liao, Xinghua Li, Yuchuan Du
Journal of Advanced Transportation
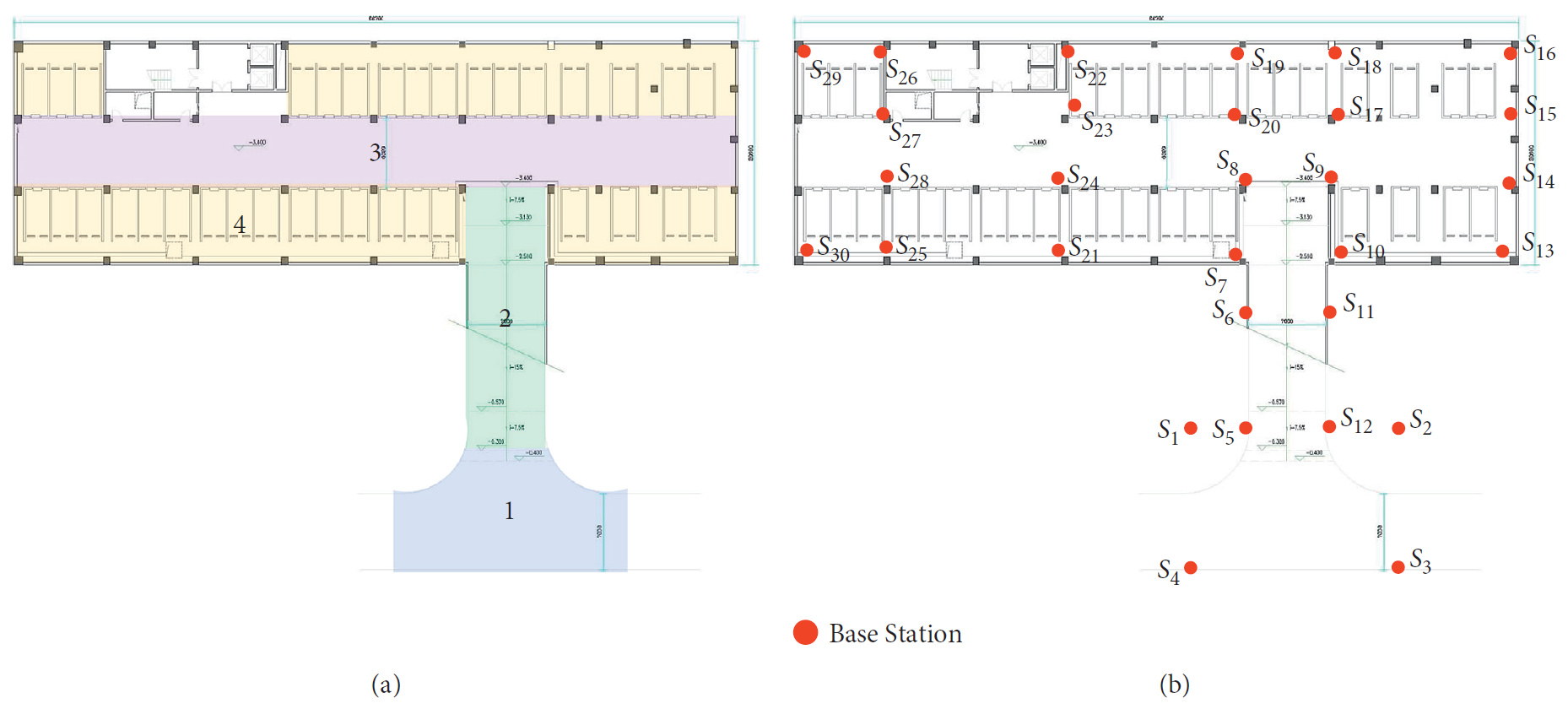
🔥ESI热点论文 🏆ESI高被引论文 A Practical and Economical Ultra-wideband Base Station Placement Approach for Indoor Autonomous Driving Systems
Shengchuan Jiang, Cong Zhao*, Yifan Zhu, Chenwei Wang, Yuchuan Du
Transportation Research Part C: Emerging Technologies
Yuchuan Du, Jing Chen, Cong Zhao*, Chenglong Liu, Feixiong Liao, Ching-Yao Chan
Journal of Transportation Engineering, Part A: Systems
Cong Zhao, Jing Cao*, Xinyuan Zhang, Yuchuan Du
IEEE Transactions on Intelligent Transportation Systems, 23(11), 22278-22289.
🔥ESI热点论文 🏆ESI高被引论文 A novel spatio-temporal synchronization method of roadside asynchronous MMW radar-camera for sensor fusion
Yuchuan Du, Bohao Qin, Cong Zhao*, Yifan Zhu, Jing Cao, Yuxiong Ji
Journal of Advanced Transportation
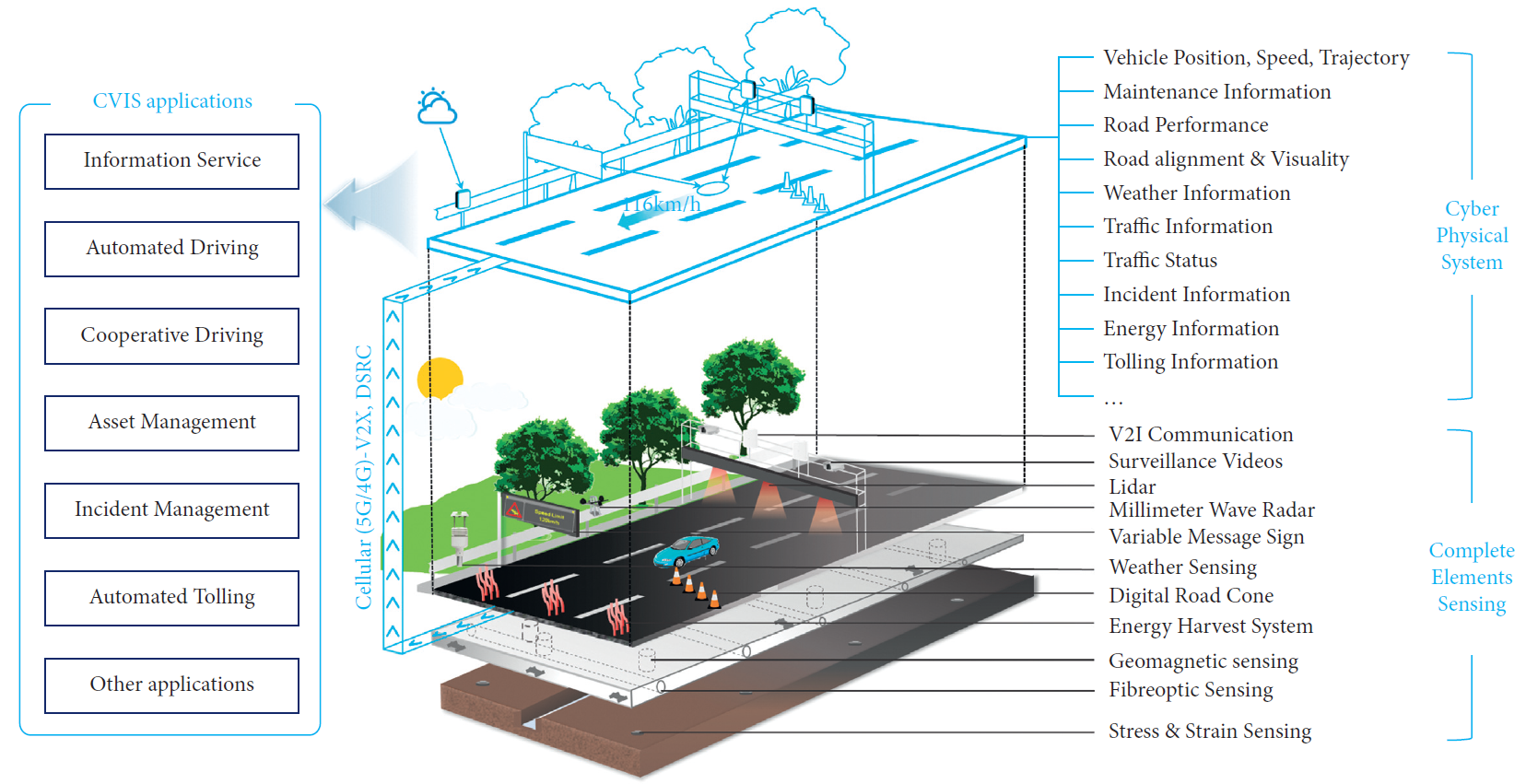
New generation of smart highway: Framework and insights
Chenglong Liu, Yuchuan Du*, Yiheng Ge, Difei Wu, Cong Zhao, Yishun Li
Transportation Research Part C: Emerging Technologies.
Cong Zhao, Feixiong Liao*, Jing Cao, Yuchuan Du*
📚 专利
- 🔥
New!Zhao C, Du Y, Zhu Y, Ji Y. A method of infrastructure-augmented cooperative perception for autonomous vehicles based on voxel feature aggregation (GB2628958) - 🔥
New!Zhao C, Du Y, Qin B, Li X. A method for multi-sensor multi-vehicle tracking based on image and motion feature matching (GB2628516) - 🔥
New!Zhao C, Du Y, Qin B, Li X. Radar and video data fusion method for vehicle tracking based on deep learning and feature similarity (GB2628517) - 🔥
New!Zhao C, Du Y, Zhu Y, Ji Y. A vehicle-road cooperative perception method for 3D object detection based on deep neural networks with feature sharing (GB2618936) - 🔥
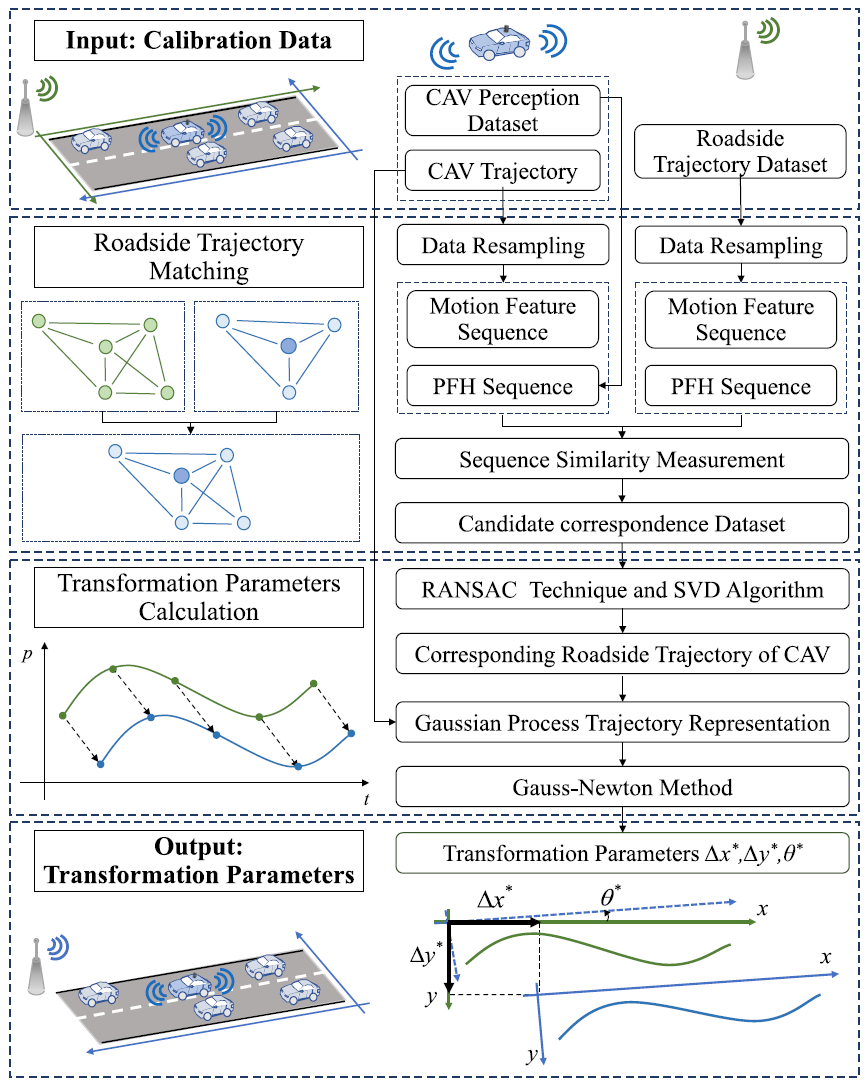
New!Zhao C, Du Y, Du Z, Ji Y. On-board positioning device-based roadside millimeter-wave radar calibration method (GB2620877) - 🔥
New!Zhao C, Du Y, Qin B, Xu A, Jiang S, Wang R, Li X. Multi-target vehicle detection and re-identification method based on radar and video fusion (GB2619196) - 🔥
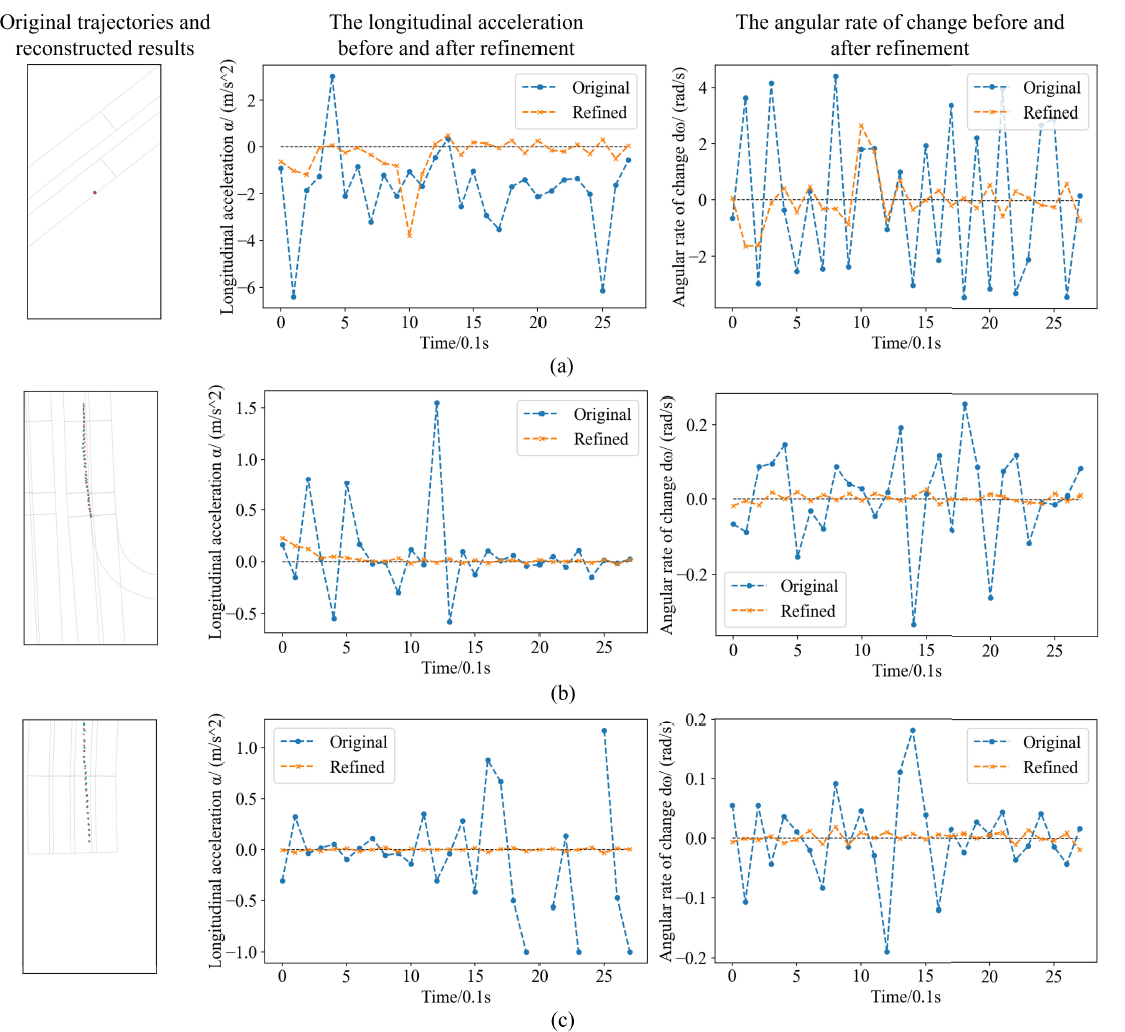
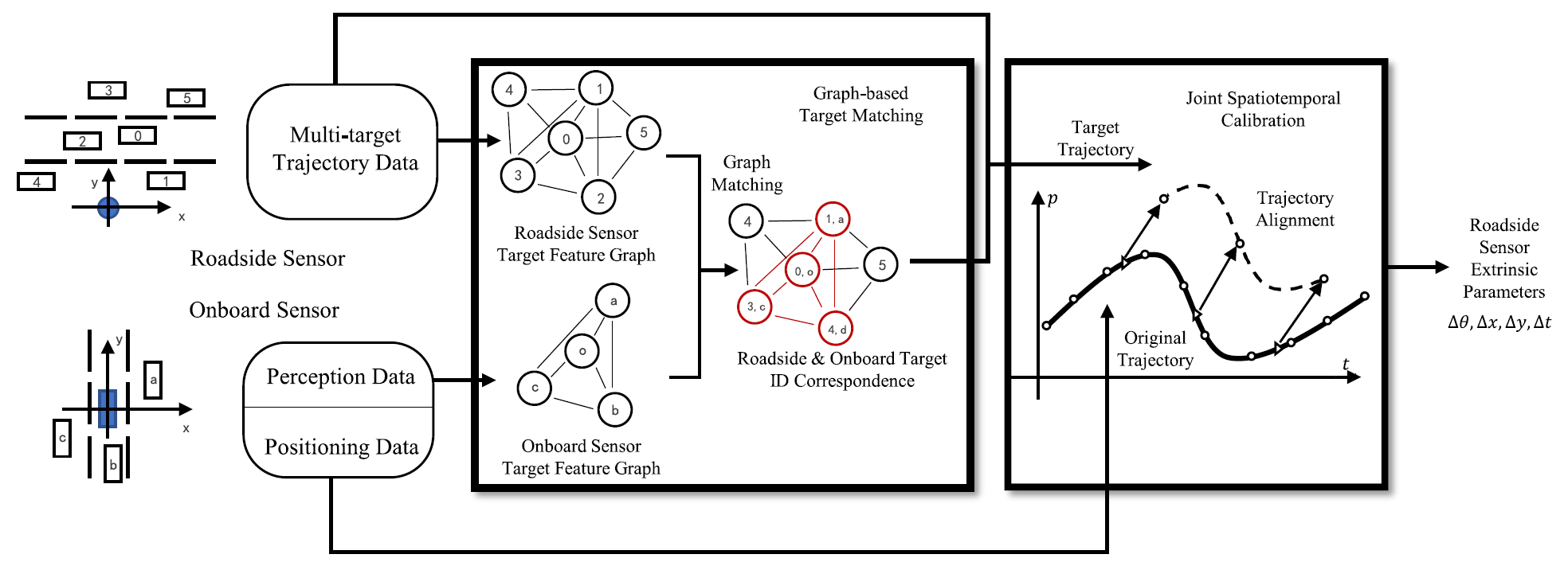
New!赵聪, 钟凌云, 汪诗雨, 杜豫川. 一种非完备感知数据下全域车辆轨迹构建方法 (ZL202210763169.7) - 🔥
New!赵聪, 丁德隆, 师钰鹏, 杜豫川, 暨育雄. 一种基于图匹配的车路协同系统多传感器时空标定方法 (ZL202310021057.9) - 🔥
New!赵聪, 杜豫川, 宋安迪. 一种集群车辆运动轨迹预测方法 (ZL202111474976.9) - 🔥
New!赵聪, 陈锟, 暨育雄, 杜豫川. 基于不确定性量化的路域全量全要素可信感知方法及系统 (ZL202411902369.1) - 🔥
New!赵聪, 曾子沐, 卞庆杰, 杜豫川. 一种跨域车辆重识别及连续轨迹构建方法 (ZL202210763102.3) - 赵聪, 李涛, 汪诗雨, 杜豫川. 一种基于双层模型的停车资源精细化管理优化方法 (ZL202311201779.9)
- 赵聪, 师钰鹏, 汪诗雨, 暨育雄, 杜豫川. 一种跨域路侧感知多车辆关联方法及系统 (ZL202311239693.5)
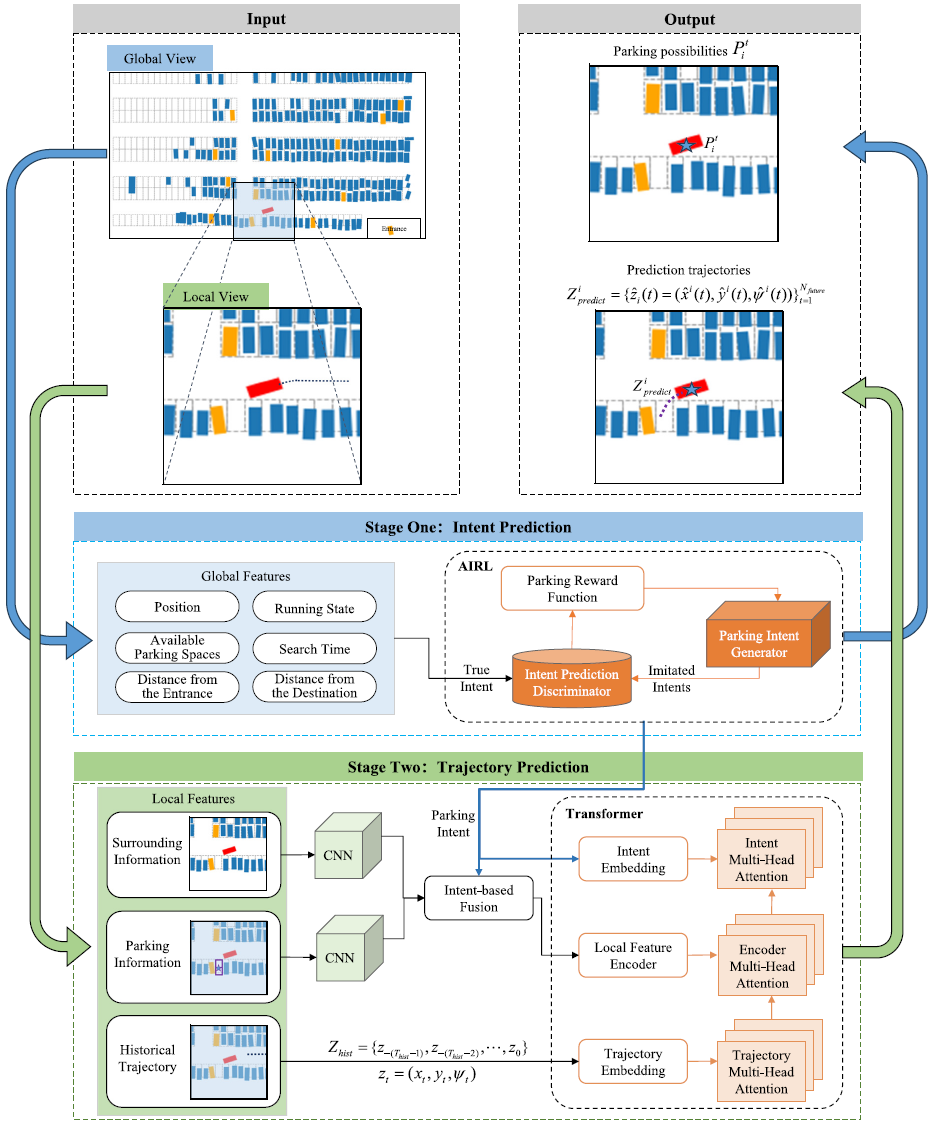
- 赵聪, 曾子沐, 宋安迪, 杜豫川. 一种面向自主代客泊车场景的车辆运动轨迹预测方法 (ZL202311335481.7)
- 赵聪, 宋安迪, 卢亚利, 郑丹妮, 周紫萱, 董家瑞, 吴鹏展, 杜豫川. 一种地下停车场盲区超视距感知及预警方法 (ZL202311151480.7)
- 赵聪, 宋安迪, 杜豫川. 一种面向路侧感知单元的车辆轨迹缺损数据修补方法 (ZL202111427550.8)
- 赵聪, 师钰鹏, 都州扬, 暨育雄, 杜豫川. 一种智能网联环境下路侧感知单元数据质量监测方法 (ZL202111465443.4)
- 赵聪, 都州扬, 师钰鹏, 杜豫川, 暨育雄. 一种道路交通感知轨迹数据的质量评估方法 (ZL202110789522.4)
- 赵聪, 杜豫川, 王凤淇, 魏斯璃. 一种路侧激光雷达点云坐标动态修正方法 (ZL202110124242.1)
- 赵聪, 杜豫川, 陈菁, 朱逸凡. 一种车路协同环境下的自动驾驶横向控制方法 (ZL202110131776.7)
- 赵聪, 杜豫川, 陈菁, 仇越. 一种车路协同环境下的自动驾驶纵向决策控制方法 (ZL202110131790.7)
🏆 获奖
- 2023, 中国科协青年人才托举工程, 中国科学技术协会
- 2024, 上海市青年科技启明星(A类), 上海市科学技术委员会
- 2025, 东方英才青年项目, 上海市教育委员会
- 2022, 上海市科技进步一等奖, 城市停车全域数字化与管理智能化关键技术及应用, 排名第2
- 2024, 中国发明协会发明创新一等奖, 智能路网交通全息可信感知与动静协同管控关键技术及应用, 排名第1
- 2024, 上海市科技进步二等奖, 城市公交云控智能导航与调度关键技术及应用, 排名第4
- 2022, 交通运输重大科技创新成果(科技论文类), 交通运输部, Macroscopic modeling and dynamic control of on-street cruising-for-parking of autonomous vehicles in a multi-region urban road network
- 2022, 交通运输重大科技创新成果(科技论文类), 交通运输部, 路侧感知车辆轨迹数据质量智能评估方法