
Dr. Cong Zhao is an Associate Professor at the School of Transportation, Tongji University, and holds a joint Ph.D. from the University of California, Berkeley. His research focuses on AI + Transportation Information and Control, as well as Vehicle-Infrastructure Integration and Autonomous Driving. He has been selected for the Young Talent Support Program of the China Association for Science and Technology, the Shanghai Youth Science and Technology Star Program (Class A), and the Oriental Elite Young Talent Program, among others. Dr. Zhao serves as a member of the Autonomous Driving Working Committee of the China Highway and Transportation Society, and a member of the Technical Committee on Autonomous Driving Road-Vehicle Collaboration of the World Transport Convention (WTC). He previously held a temporary position at the National Development and Reform Commission, where he participated in the compilation of the “15th Five-Year Plan” for the development of modern comprehensive transportation and the “15th Five-Year Plan” for highway development. He was also the main drafter of the intelligent connected vehicle part of the “Energy-Saving and New Energy Vehicle Technology Roadmap 3.0”, actively serving national strategies and the high-quality development of the industry.
In the past five years, Dr. Zhao has published 45 papers as first or corresponding author in leading interdisciplinary journals across transportation, automotive engineering, artificial intelligence, control systems, and management. This includes 21 papers in top-tier Q1 journals (IF≥7.4), 11 ESI Highly Cited Papers, and 2 ESI Hot Papers. His papers have been selected as the Annual Excellent Paper of the “China Journal of Highway and Transport” (ranked first in the discipline by impact factor) and the Major Science and Technology Innovation Achievement of Transportation (Paper Category). He has been granted 15 Chinese invention patents and 6 British patents as the first inventor, and some patents have achieved technology transformation through authorized use. He participated in the compilation of the Shanghai local standard “Technical Requirements for the Operation of Autonomous Driving Container Trucks in Ports”, the first set of series standards (5 in total) for the functional credibility evaluation method of vehicle-infrastructure integrated autonomous driving systems issued by the China Society of Automotive Engineers, and the standard specification “Resilient Transportation Cyber-Physical System Architecture for Urban Transportation” issued by the China Intelligent Transportation Association. His achievements have attracted extensive attention from peers at home and abroad and have received positive citations and evaluations from experts such as academicians of the Chinese Academy of Engineering, academicians of the US National Academy of Engineering, academicians of the European Academy of Sciences, academicians of the Canadian Academy of Engineering, and IEEE Fellows.
Focusing on typical scenarios with clear application demands and controllable regional boundaries such as smart ports, smart highways, and autonomous parking, Dr. Zhao has carried out industry-university-research collaborative modular development, system integration, and application promotion of the basic research achievements “Trustworthy Perception - Collaborative Cognition - Pilot Control”. He pioneered an indoor and outdoor integrated berth-level navigation system and an autonomous valet parking system, which have been applied on a large scale in more than 100 large parking lots in cities such as Beijing, Shanghai, Guangzhou, and Shenzhen. Furthermore, his work effectively supports the research and development of port automation transportation systems and their systematic construction, having been successfully implemented in important domestic and foreign ports such as Shanghai Port (with the world’s largest throughput for 15 consecutive years) and Peru’s Chancay Port (a landmark project of the “Belt and Road Initiative”). As a key contributor, his project “Key Technologies and Applications of Global Digitization and Management Intelligence of Urban Parking” won the First Prize of the Shanghai Science and Technology Progress Award (ranked 2nd, 2022), and the project “Key Technologies and Applications of Holographic Trustworthy Perception and Dynamic-Static Collaborative Regulation of Intelligent Road Network Traffic” won the First Prize of the Invention and Innovation Award of the China Invention Association (ranked 1st, 2024).
Dr. Zhao teaches interdisciplinary courses such as Traffic Data Analysis, Transportation Economics, and Traffic Technology Competition. He has guided undergraduate students to win the First Prize of the National Transportation Science and Technology Competition, the First Prize of the National University Intelligent Transportation Innovation and Entrepreneurship Competition, and other honors. Many undergraduate and graduate students mentored by him have graduated and pursued further studies in world-class universities at home and abroad such as UC Berkeley, MIT, Tsinghua University, and Peking University.
📖 Educational Background
- 2010.09 - 2014.07, Tongji University, Traffic Engineering, Bachelor’s Degree.
- 2014.09 - 2017.07, Tongji University, Transportation Engineering, Master’s Degree.
- 2018.11 - 2019.12, University of California, Berkeley, Transportation Research Institute, Joint PhD Student.
- 2017.09 - 2020.08, Tongji University, Ph.D. in Transportation Engineering, Supervisor: Professor Du Yuchuan.
💻 Professional Experience
- 2020.11 - 2024.02, Tongji University, College of Transportation, Postdoctoral Fellow (Supervisor: Academician Jifeng He).
- 2024.03 - Present , Tongji University, College of Transportation, Associate Professor.
- 2025.01 - Present , Serving on a temporary attachment for training at the Department of Infrastructure Development, National Development and Reform Commission (NDRC).
🔍 Research Projects
- 2025.01 - 2028.12, Research on Cloud Control Scheduling of Automated Valet Parking in Human-Machine Mixed Driving Environment, General Program of National Natural Science Foundation of China (No. 52472352), Principal Investigator.
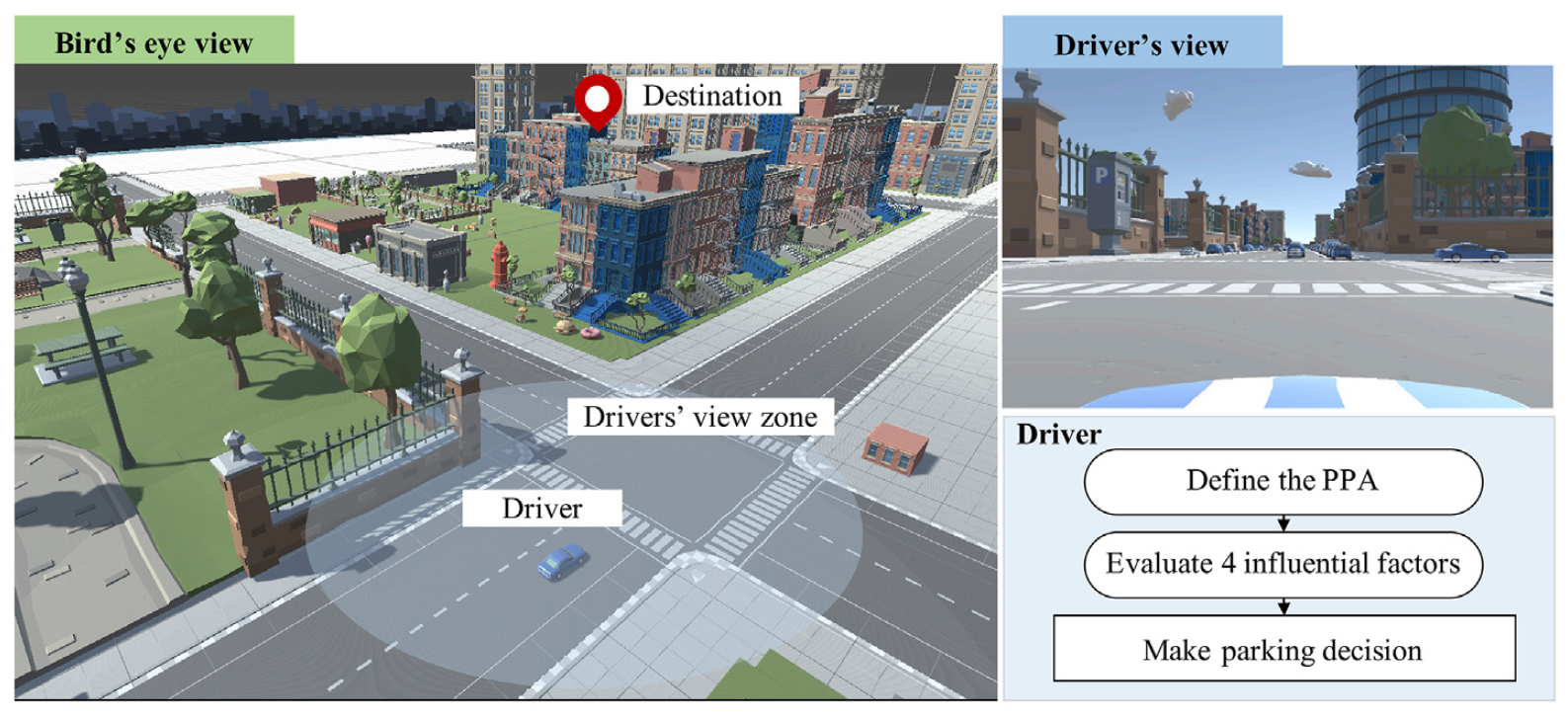
- 2022.01 - 2024.12, Research on Mapping Mechanism between Parking Search Behavior and Traffic State Evolution in Urban Road Network, Youth Program of National Natural Science Foundation of China (No. 52102383), Principal Investigator.
- 2025.01 - 2025.12, Research on the Development Strategy of Transportation and Vehicle Engineering Discipline in the New Era, Special Project of National Natural Science Foundation of China (No. 52442213), Core Member.
- 2021.12 - 2024.11, R&D on Key Technologies and Systems for Terminal Operation and Platoon Autonomous Driving of Container Transport Vehicles(Sub-project: V2X Beyond Visual Range Perception and Positioning Enhancement Technology for Port & Arterial Roads), National Key R&D Program of China (No. 2021YFB1600403), Principal Investigator.
- 2020.11 - 2024.10, Trustworthy and Interpretable Hybrid Intelligent Decision-Making & Online Evaluation for Human-Machine Cooperative Driving, Science and Technology Innovation 2030 Major Project – New Generation AI (No. 2020AAA0108101), Core Member.
- 2023.01 - 2024.03, Scheduling Modeling and Optimization of Parking System under Automated Valet Parking Scenarios, Special Grant of China Postdoctoral Science Foundation (No. 2023T160487), Principal Investigator.
- 2023.03 - 2024.02, Development Status and Evolution Trend of Integrated ICV & Transportation Technology, Shanghai Science and Technology Innovation Action Plan (No. 23692106300), Principal Investigator.
- 2024.12 - 2027.11, Vehicle-Road-Cloud Integrated Fusion Enhancement and Operation Optimization for Automated Parking, Shanghai Rising-Star Program (No. 24QA2709600), Principal Investigator.
- 2021.01 - 2025.12, Key Technologies of Swarm Intelligence Cooperation for Autonomous Driving Based on Vehicle-Road Holographic Environment, Major Natural Science Project of Shanghai Municipal Education Commission, Core Member.
- 2024.09 - 2026.08, Vehicle-Road-Cloud Integrated Operation & Control System for Automated Parking, Jiading District “Listing for Leadership” S&T Innovation Project, Principal Investigator.
📰 News
近日,上海市科学技术委员会公示了2024年度上海市“科技创新行动计划”青年科技启明星计划(A类)立项项目名单。同济大学交通学院赵聪副教授申报的《车路云一体化架构下自主泊车路车融合增强与运行优化研究》成功入选。
项目瞄准“停车难”痛点,以车路云一体化破解自主泊车落地瓶颈。针对停车空间半结构化、弱规则化、高密集交互等复杂特征,本项目拟采用车路云一体化技术路径,重点攻克自主泊车失效风险辨识与路辅靶向增强两大关键难题,为特定场景自动驾驶应用提供可复制、可推广的方案。上海市青年科技启明星计划(A类)是上海市科委最具影响力的青年人才项目之一,赵聪此次入选,标志着其在前沿交叉领域的创新能力和工程转化成果获得高度认可。
近日,按照中国科协相关文件要求,中国公路学会在公路交通行业内开展青年人才托举工程遴选工作,课题组赵聪副教授以复评第一的身份顺利入选第八届中国科协青年人才托举工程中国科协资助名额。
“青年人才托举工程”是中国科协设立的国家级青年人才计划,采用以奖代补、稳定支持的方式,连续三年资助,大力扶持有较大创新能力和发展潜力的32岁以下青年科技人才,帮助他们在创造力黄金时期做出突出业绩,成长为国家主要科技领域高层次领军人才和高水平创新团队的重要后备力量。
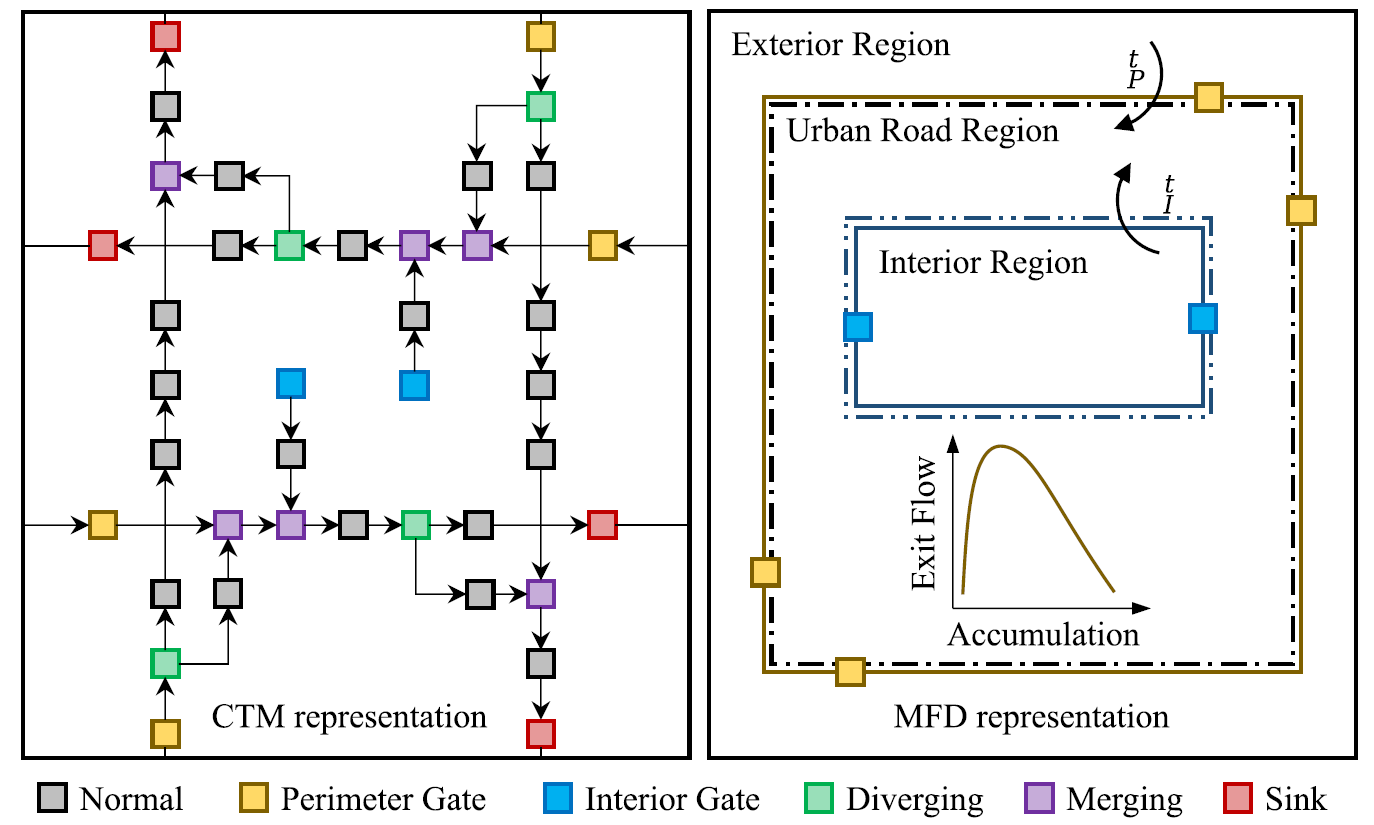
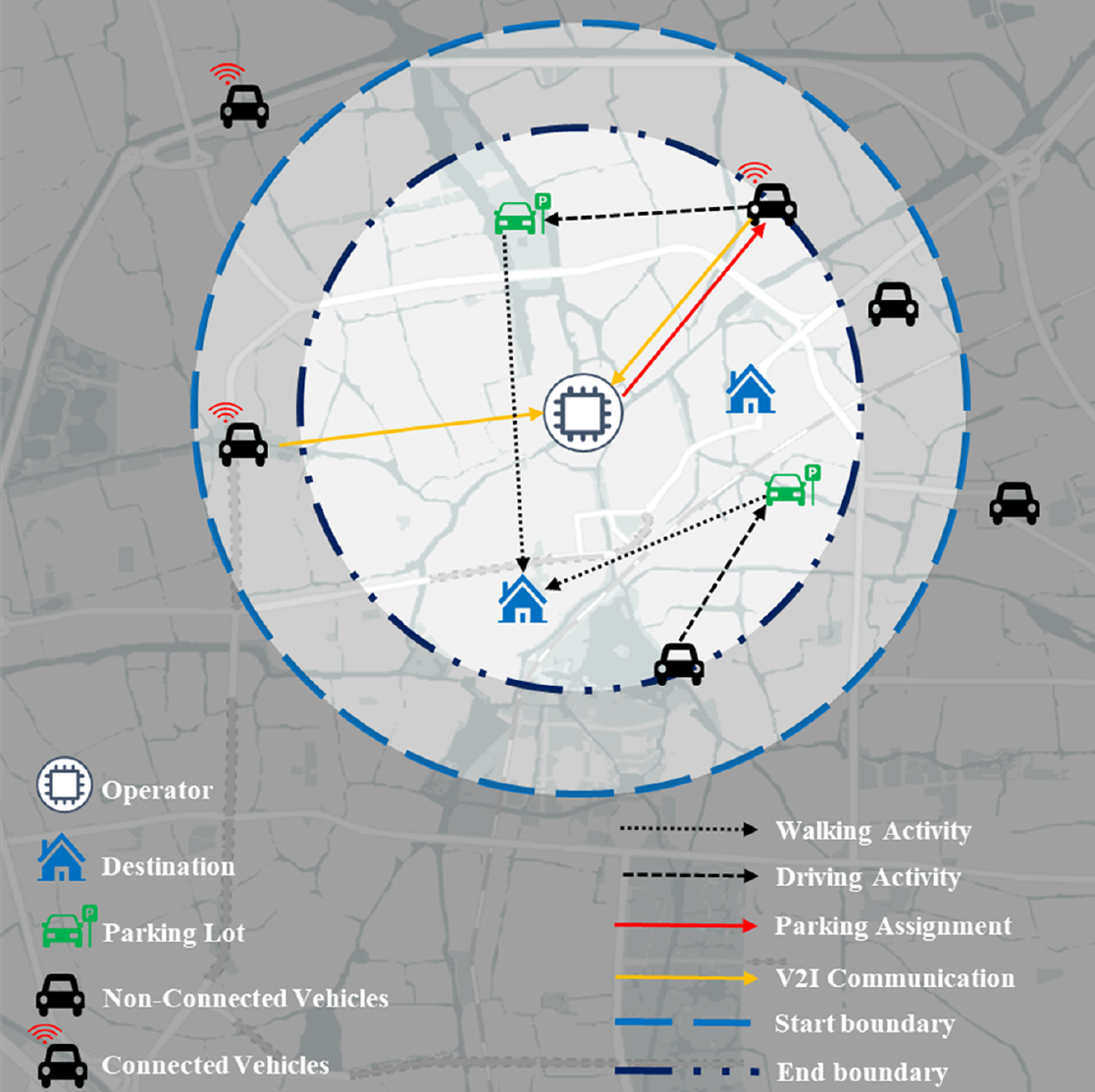
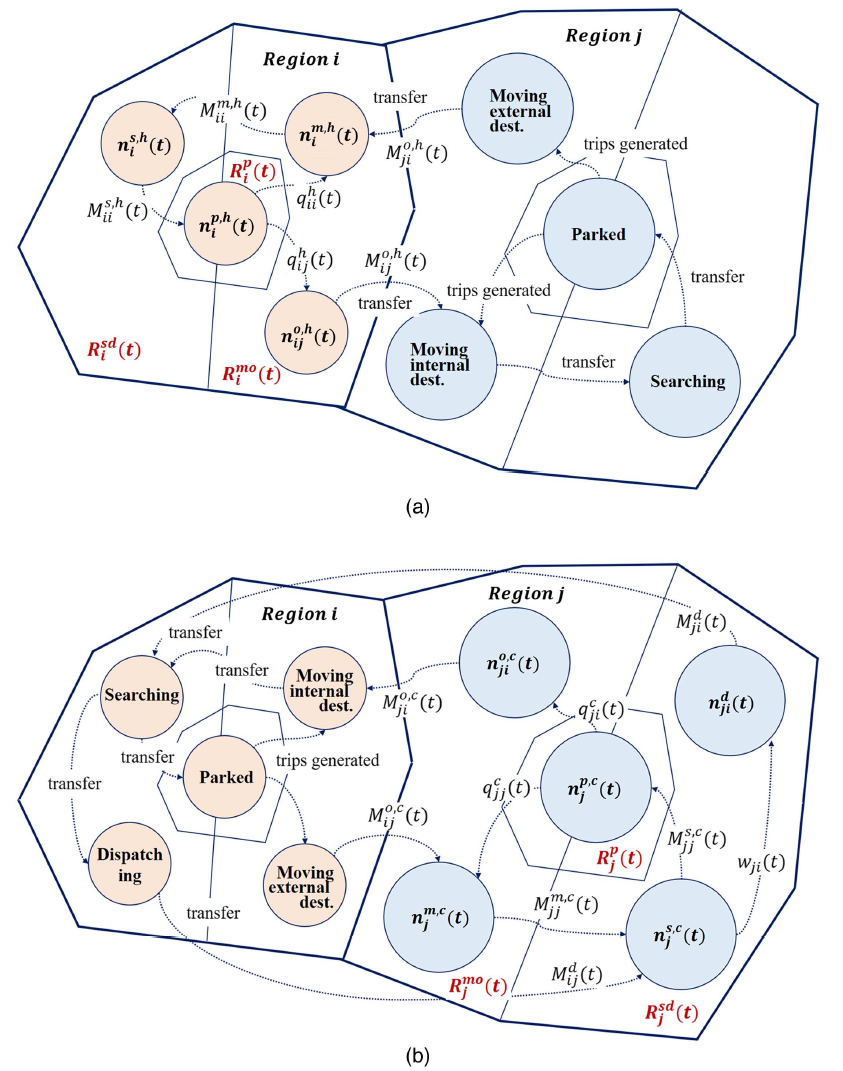
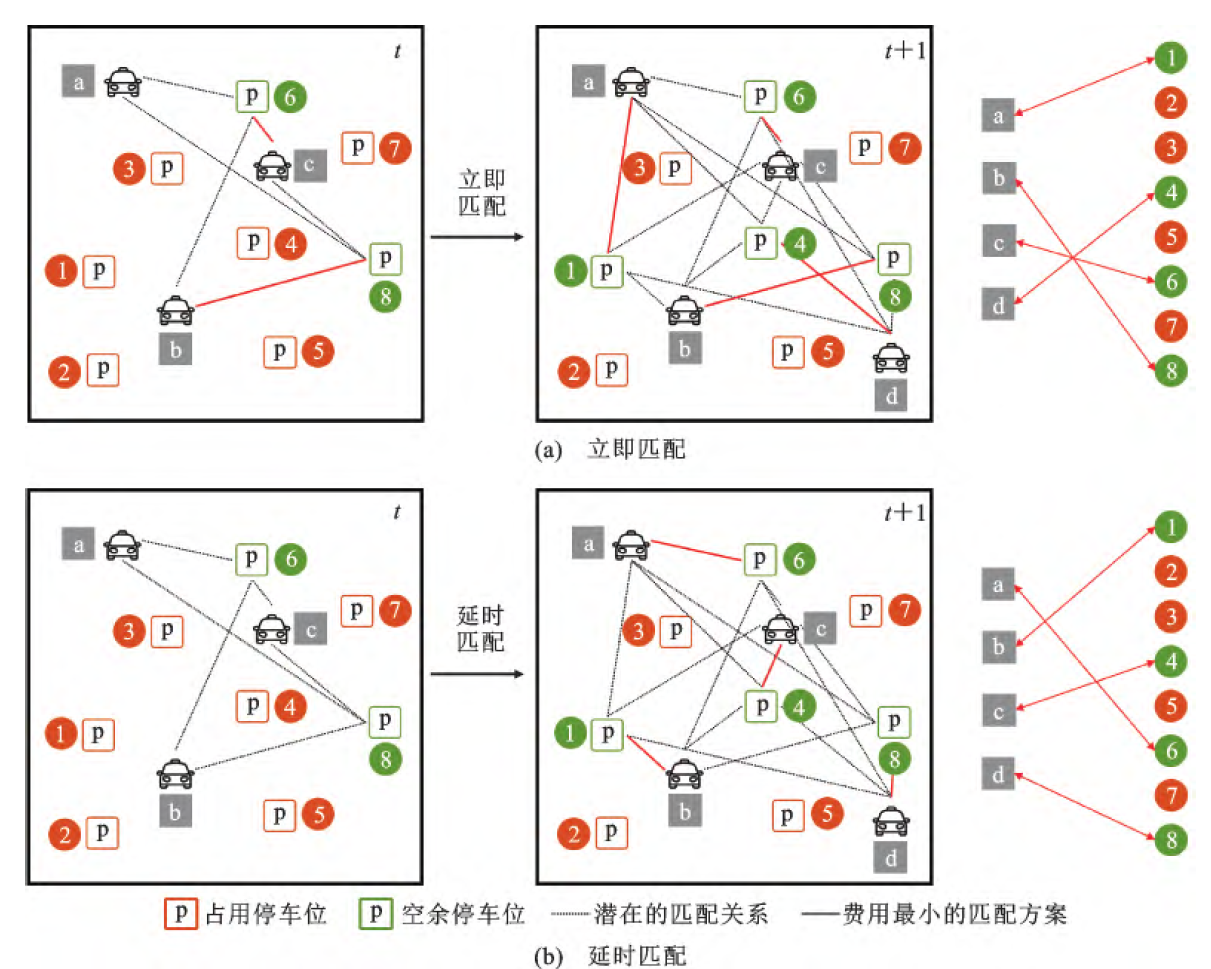
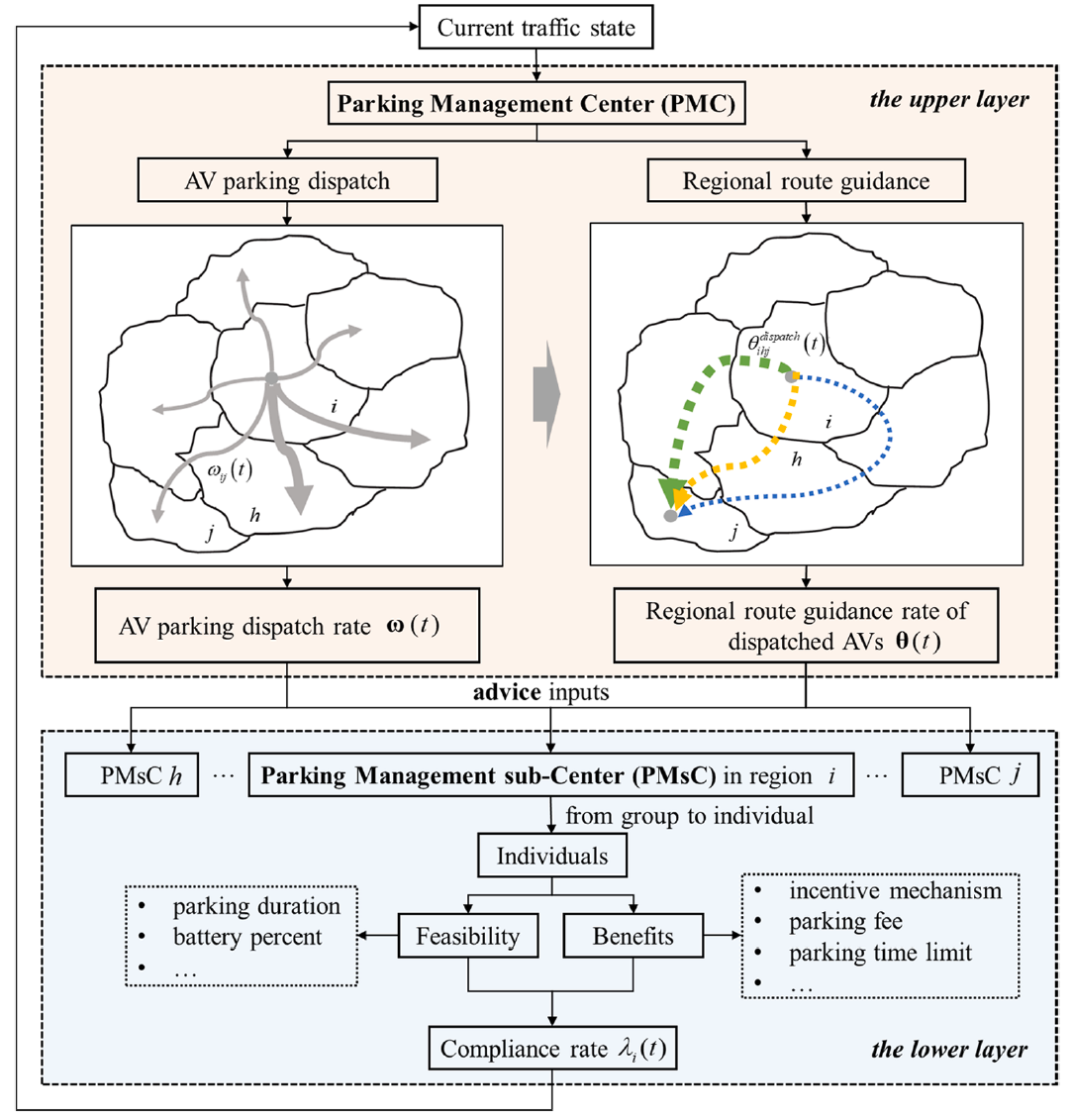
根据基本科学指标库 ESI(Essential Science Indicators)最新统计数据,以课题组赵聪副教授为第一作者,杜豫川教授为通讯作者,同济大学道路与交通工程教育部重点实验室为第一完成单位,发表在智能交通领域顶级国际期刊 Transportation Research Part C: Emerging Technologies(中科院一区,Top 期刊,IF: 9.022)的论文“Macroscopic modeling and dynamic control of on-street cruising-for-parking of autonomous vehicles in a multi-region urban road network”(2021年,128卷)入选工程领域 ESI 全球 TOP 1.0% 高被引论文和研究前沿核心论文。
该研究聚焦城市“停车难”痛点问题,面向汽车智能化、网联化发展趋势,揭示了自动驾驶环境下路网静态停车与动态交通的交互影响规律,提出了中心化网联云调度的城市停车管理新范式。为实现区域供需动态平衡,减少停车巡游,论文提出了“区域间总量控制-区域内动态调度-车位级智能匹配”的三层调度框架,构建了动静一体的宏观交通分析模型,拓展了现有的理论体系。研究成果为智能网联环境下的城市停车管理提供了决策支持工具,具有广阔的应用前景。
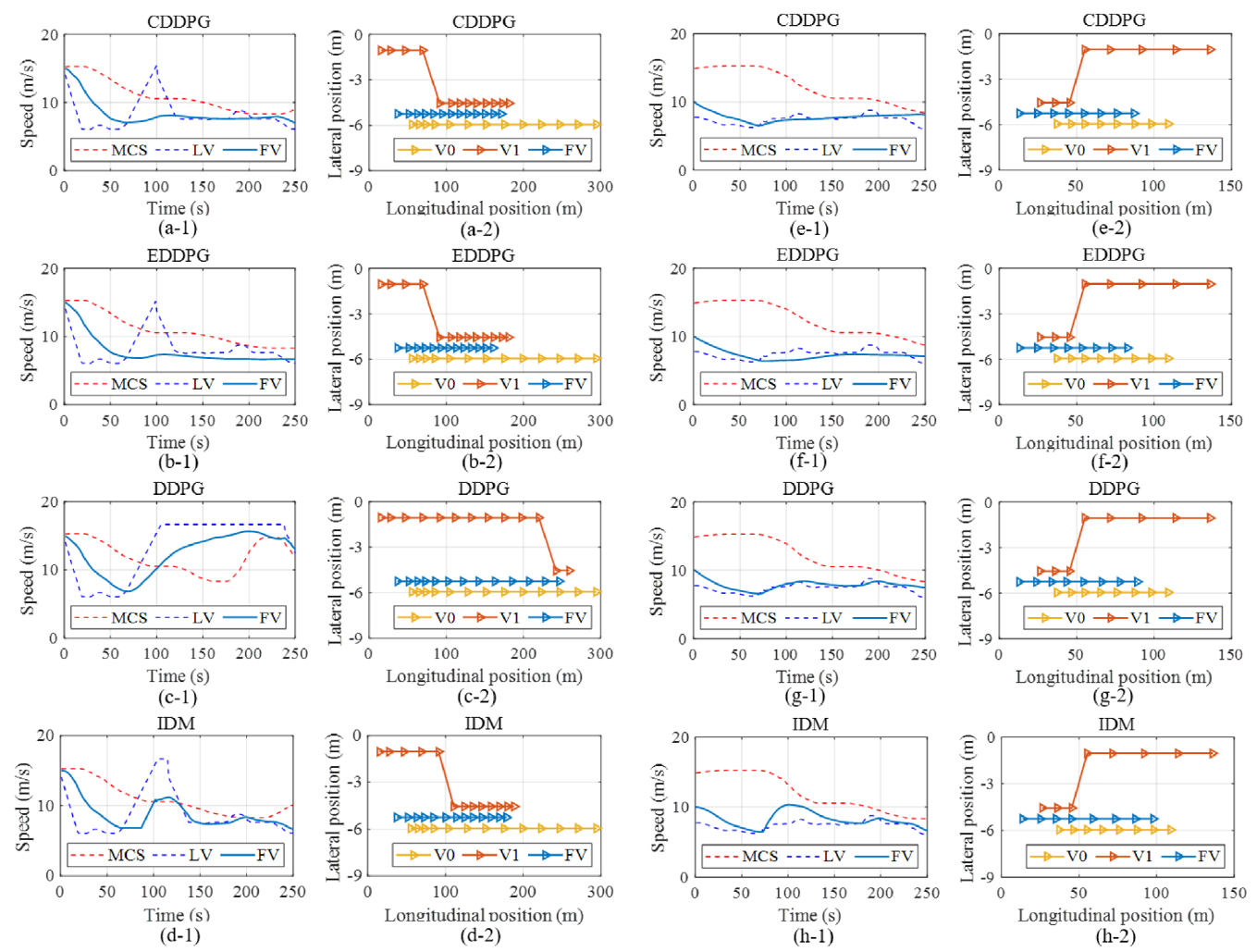
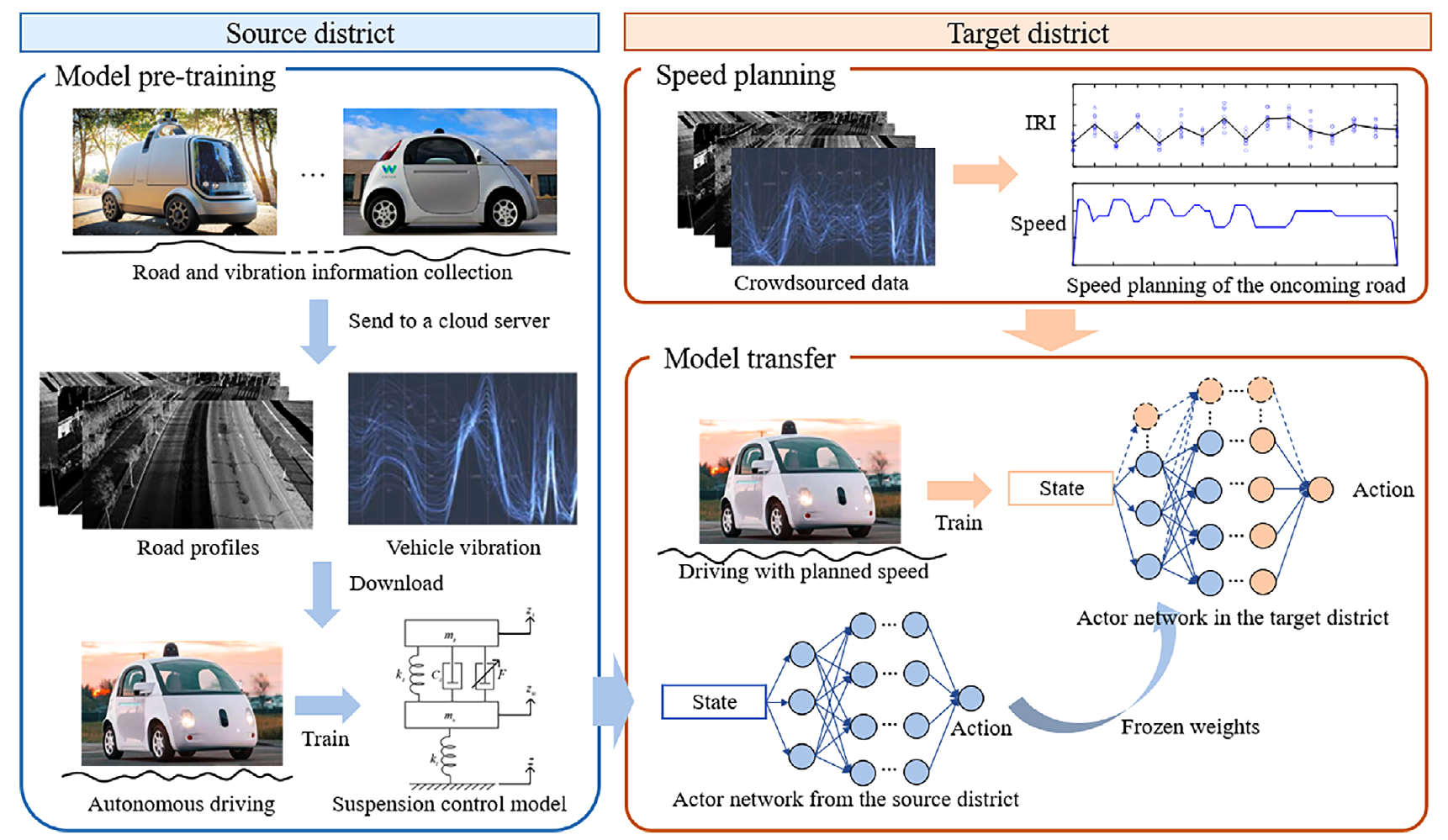
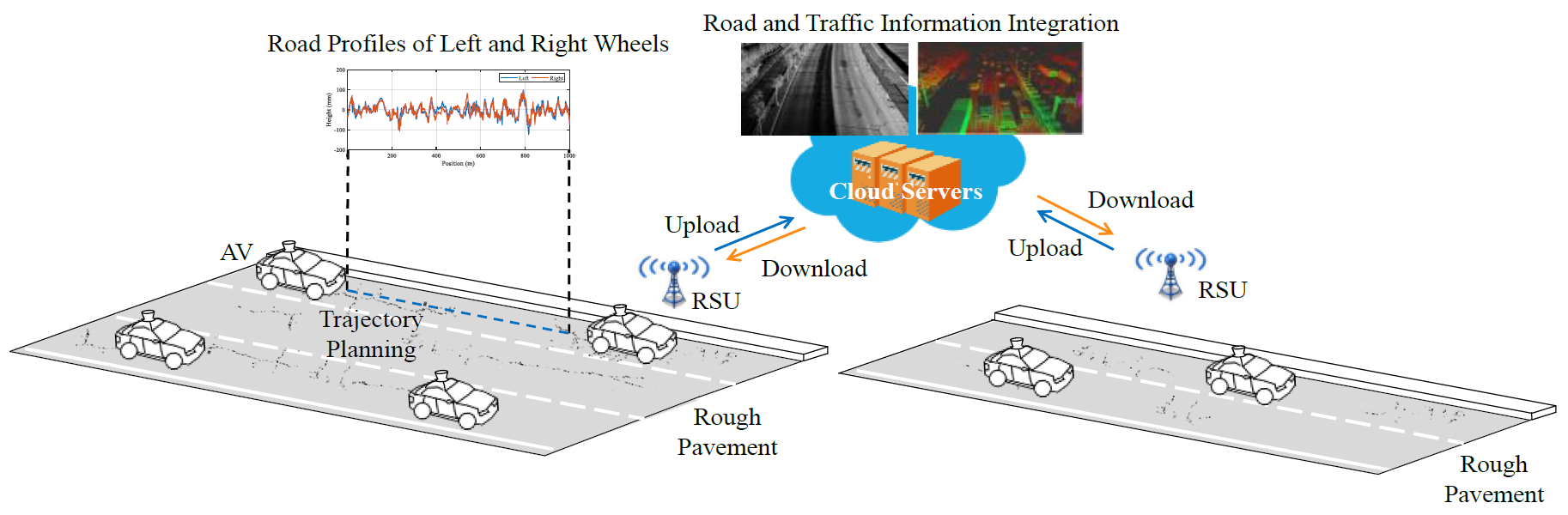
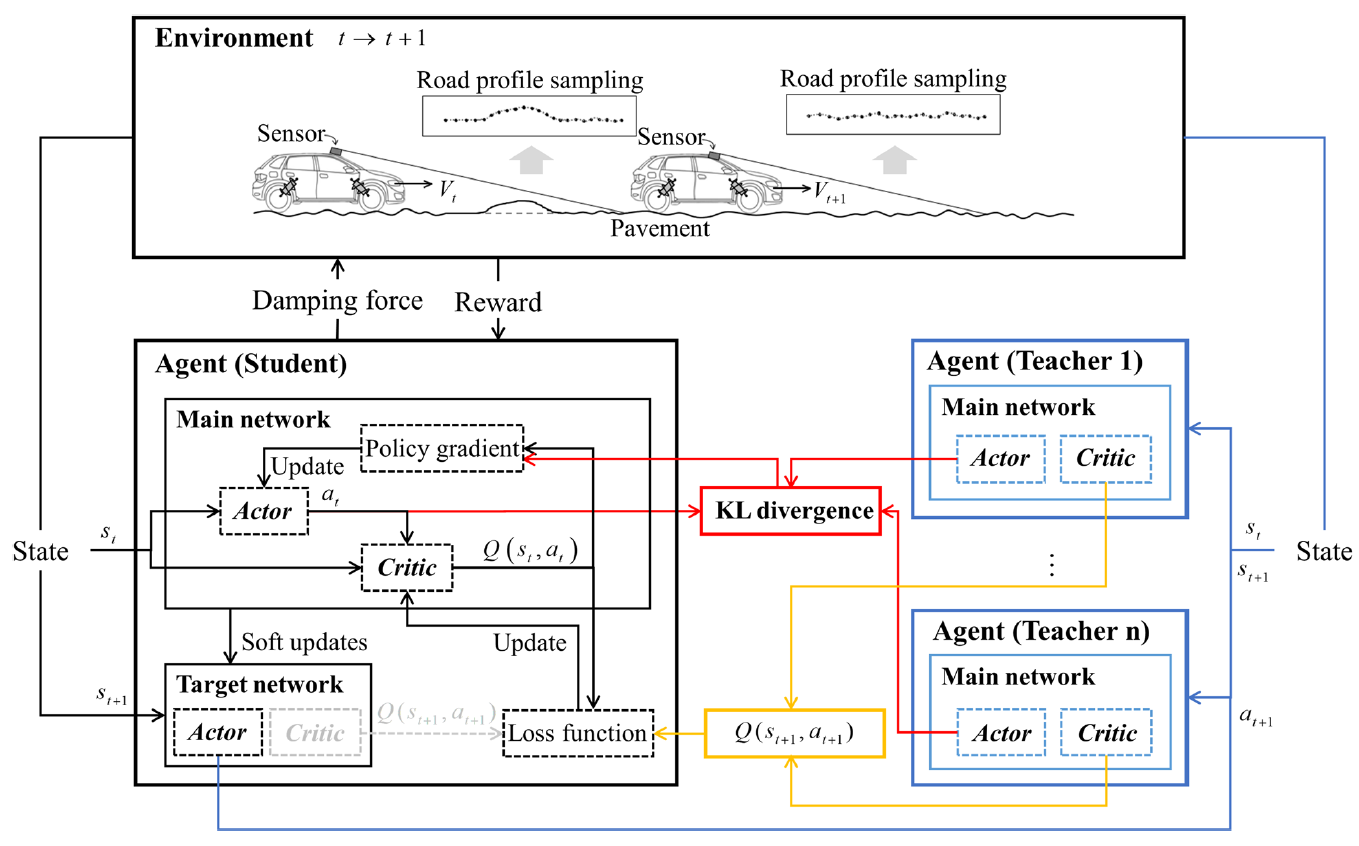
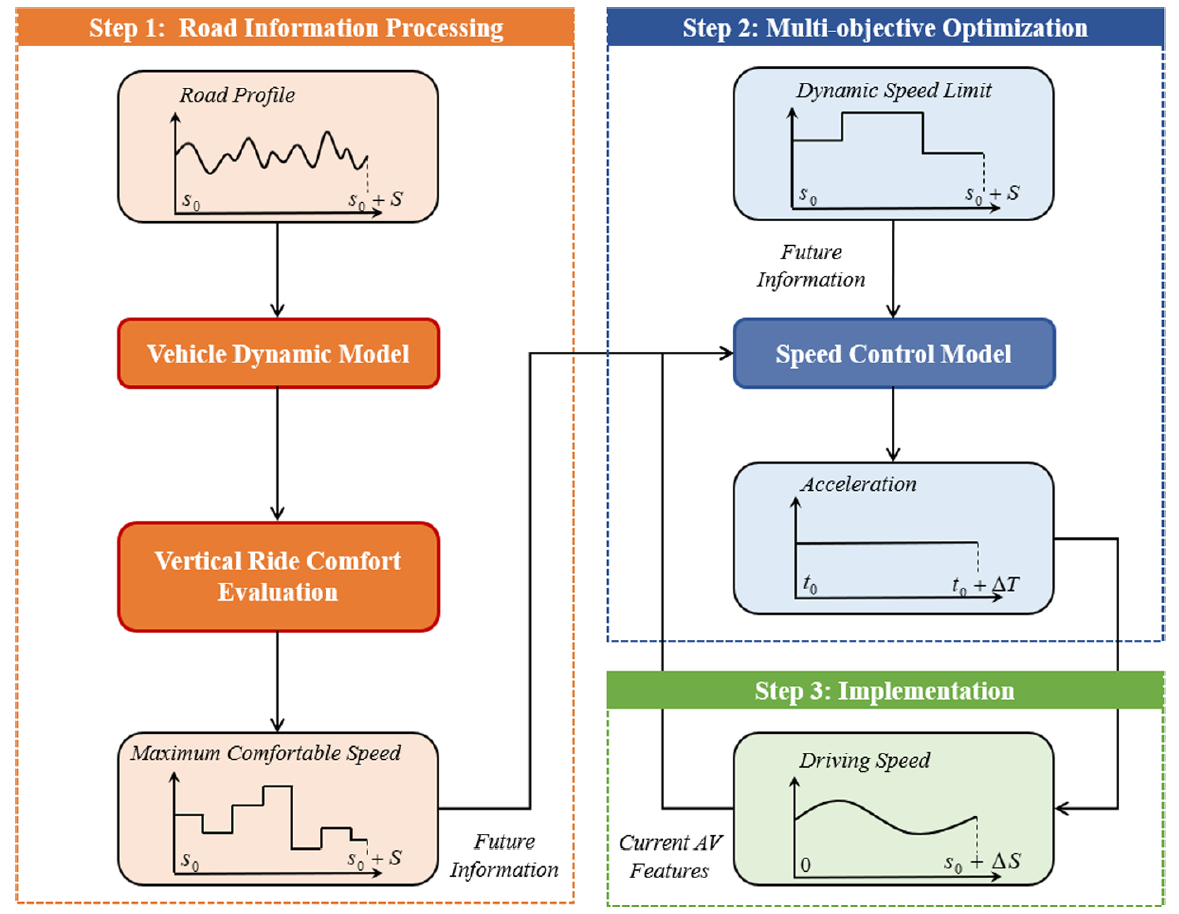
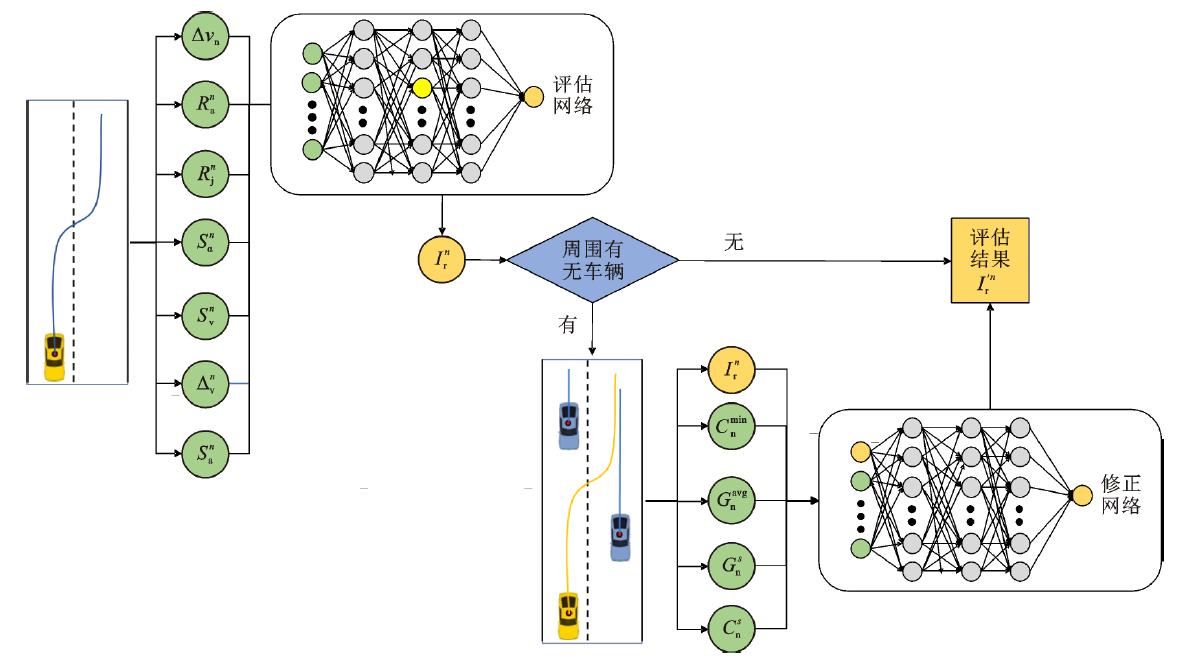
根据基本科学指标库 ESI 最新统计数据,以同济大学智能交通新兴计算与感知研究课题组杜豫川教授为第一作者,赵聪副教授为通讯作者,同济大学道路与交通工程教育部重点实验室为第一完成单位,发表在交通运输领域顶级国际期刊 Transportation Research Part C: Emerging Technologies(中科院一区,Top 期刊,IF: 9.022)的论文“Comfortable and energy-efficient speed control of autonomous vehicles on rough pavements using deep reinforcement learning”(2022年,134卷)入选工程领域 ESI 全球 TOP 1.0% 高被引论文。
该研究面向车路协同自动驾驶环境,为提升车辆行驶的舒适性和节能性,率先利用海量路面数据和新兴深度强化学习算法,构建了一种高效的自动驾驶智能决策控制框架。研究创新性提出“最大舒适速度”概念,以表征自动驾驶车辆前方复杂的路面环境信息;进而利用深度强化学习方法构建速度决策模型,使用海量的实证路面数据和高可信的车路交互仿真环境训练深度神经网络参数。实验结果证明,相比于传统的模型预测控制方法,该模型在舒适度、节能和实时计算效率上分别提升了 8.22%、24.37% 和 94.38%,为车路协同环境下的速度决策控制提供了新思路。
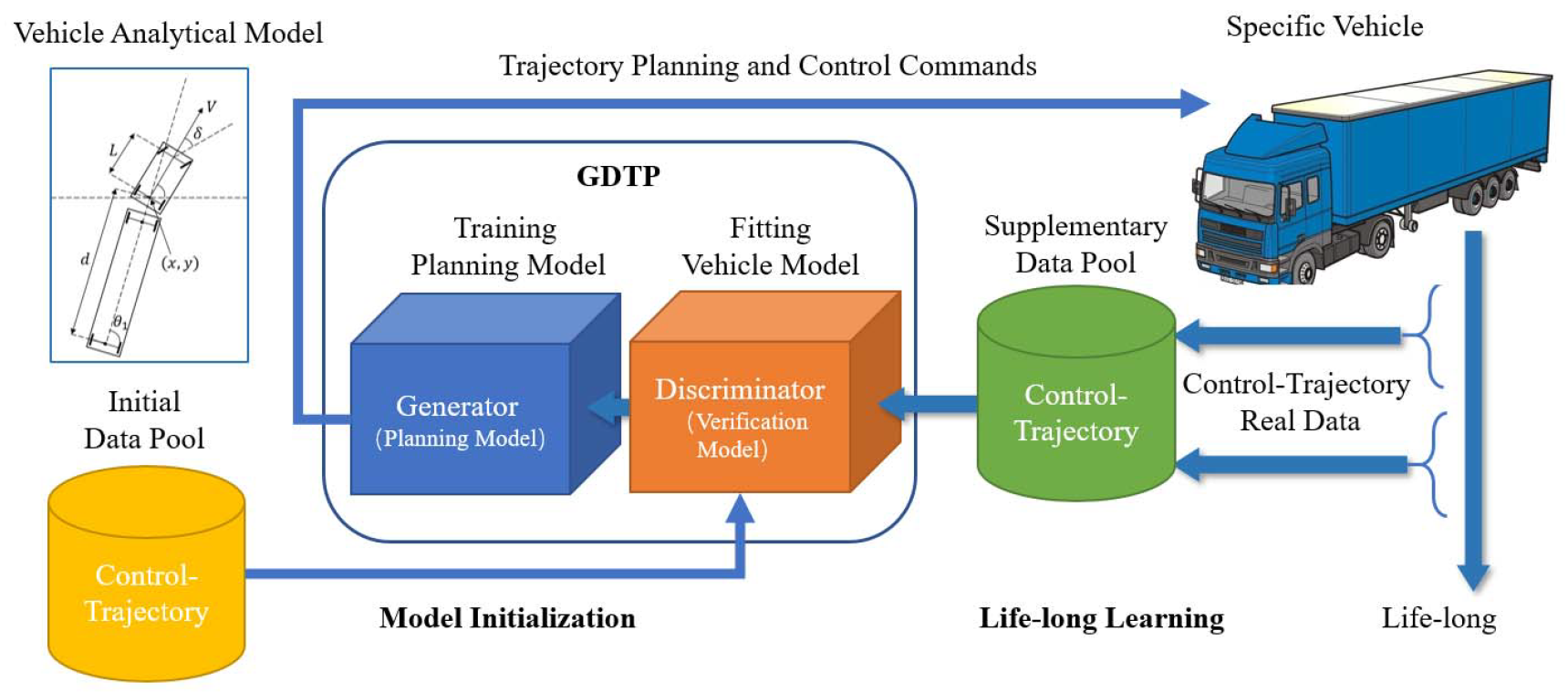
根据基本科学指标库ESI(Essential Science Indicators)的最新统计数据,以课题组赵聪副教授为第一作者,杜豫川教授为通讯作者,同济大学道路与交通工程教育部重点实验室为第一完成单位,发表在智能交通领域顶级国际期刊IEEE Transactions on Intelligent Transportation Systems(中科院一区,Top期刊,影响因子为8.4)的论文“A Novel Direct Trajectory Planning Approach Based on Generative Adversarial Networks and Rapidly-Exploring Random Tree”(2022年,23卷,10期)入选工程(Engineering)领域ESI全球TOP 1.0%高被引论文。
该研究面向自动驾驶车辆在复杂多障碍物场景下的高精度轨迹规划需求,针对现有方法在轨迹可行性与长阶段计算效率方面的局限,提出了一种基于生成对抗网络(GAN)与快速探索随机树(RRT)的直接轨迹规划(DTP)终身学习框架。研究团队构建了轻量级GDTP模型,以表征车辆初始/目标状态与控制动作序列间的映射关系;进而将该模型嵌入至RRT算法中,开发了GDTP-RRT规划算法。以运动学约束复杂的牵引挂车系统为例的多场景测试表明,相比于传统的三次曲线RRT算法,该方法在保持高计算效率的同时有效提升了轨迹可行性,其位置与航向角的跟踪误差分别降低了29.1%和44.1%。研究成果为解决复杂约束下的车辆轨迹规划问题提供了有效的新思路,为高级别自动驾驶系统的落地应用提供了重要的理论依据与技术参考。
ESI是由世界著名的学术信息出版机构美国科技信息所(ISI)推出的衡量科学研究绩效、跟踪科学发展趋势的基本分析评价工具,是基于汤森路透Web of Science(SCIE/SSCI)所收录的全球11000多种学术期刊的数千万条文献记录而建立的计量分析数据库。ESI对全球所有的SCIE、SSCI库中2005年以来的论文数据进行统计,按被引频次的高低确定出衡量研究绩效的阈值;ESI高被引论文已成为当前衡量和评价国家/地区科研水平、机构学术声誉、学科水平、科学家学术影响力以及期刊学术水平的一个重要指标。ESI Top 1.0 %高被引论文是指同年度同学科领域中被引频次排名前1.0%以内的文章。
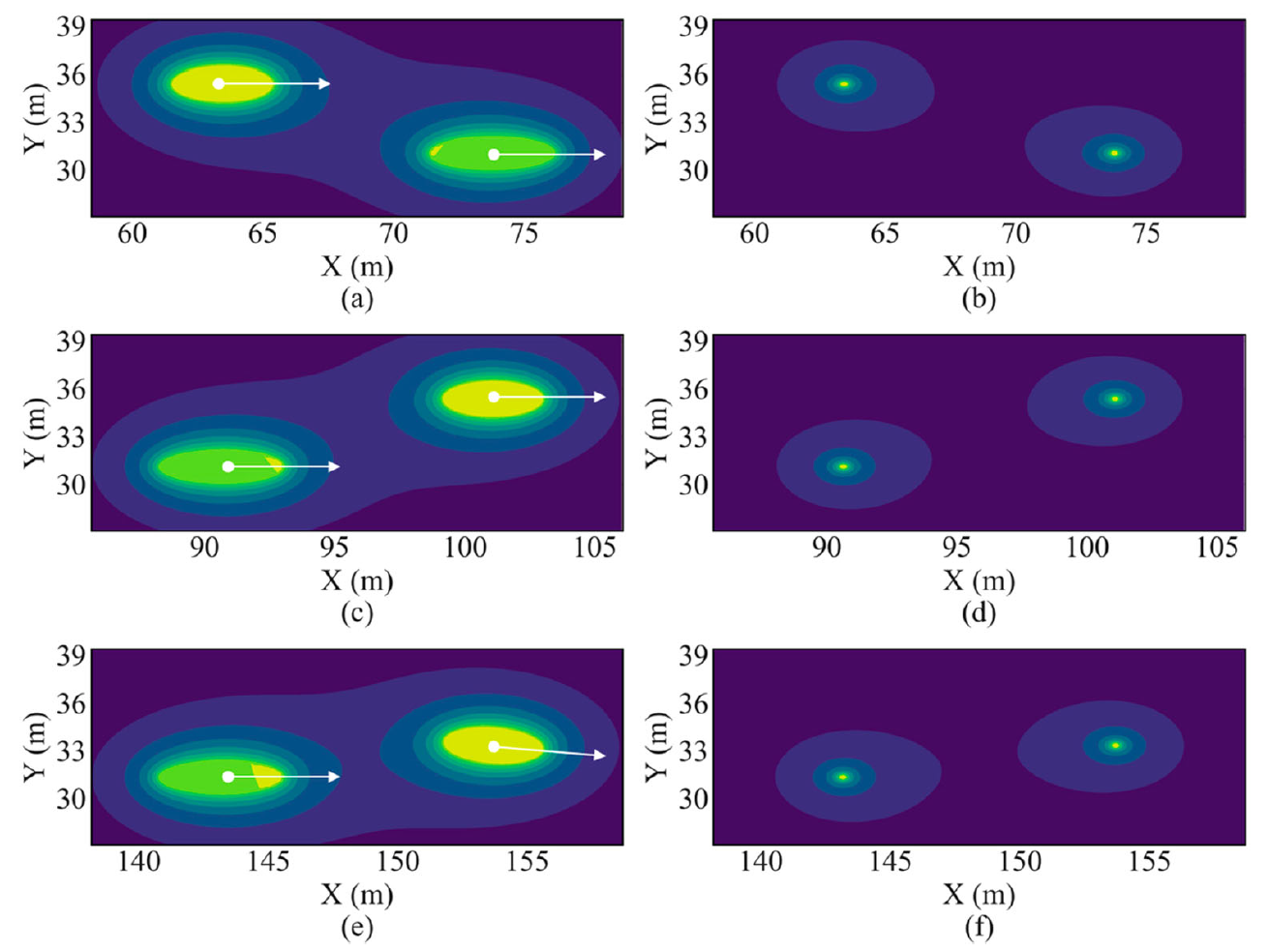
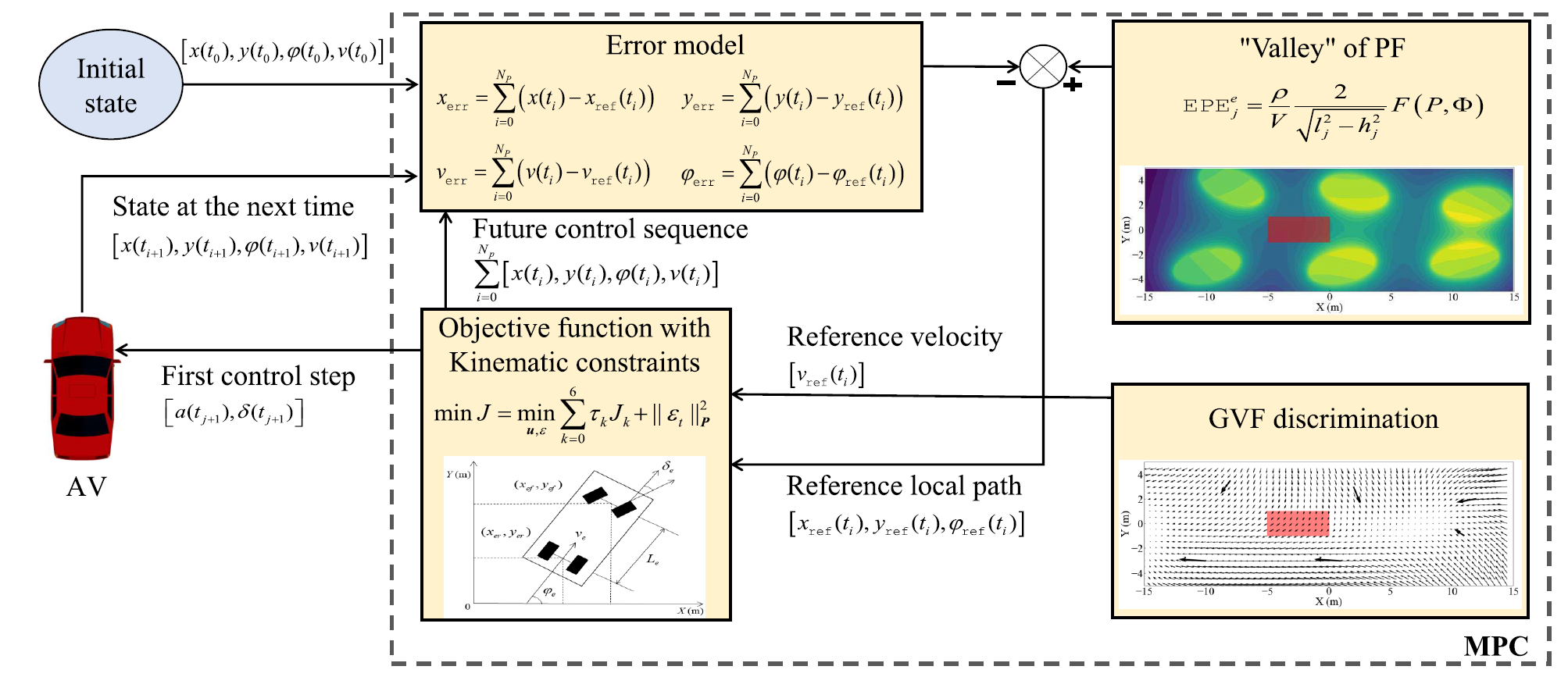
根据基本科学指标库ESI(Essential Science Indicators)的最新统计数据,以课题组暨育雄教授为第一作者,赵聪副教授为通讯作者,同济大学道路与交通工程教育部重点实验室为第一完成单位,发表在智能交通领域顶级国际期刊IEEE Transactions on Intelligent Transportation Systems(中科院一区,Top期刊,影响因子为8.4)的论文“TriPField: A 3D Potential Field Model and Its Applications to Local Path Planning of Autonomous Vehicles”(2023年,24卷,3期)入选工程(Engineering)领域ESI全球TOP 1.0%高被引论文。
该研究面向自动驾驶车辆在复杂动态障碍物场景下的局部路径规划需求,针对传统人工势场模型因各向同性及忽略目标几何特征易陷入局部最优的问题,提出了一种三维势场(TriPField)规划模型。该模型融合了椭球势场与高斯速度场(GVF):在椭球坐标系下通过求解拉普拉斯方程表征周边车辆的三维轮廓与姿态;并引入非参数GVF捕捉多车动态交互特征以指导速度规划;最后结合模型预测控制(MPC),构建了满足底层运动学约束的规划框架。在主动变道、匝道汇入和跟车等典型场景的实验表明,与传统势场规划器相比,该方法将局部路径长度、路径粗糙度、加速度变化率及MPC跟踪误差分别降低了10%、11%、24%和20%,并在周边车辆异常驾驶时仍能实现有效避障。该成果为复杂密集交通流下的自动驾驶高精度运动规划提供了可靠的理论依据与工程参考。
ESI是由世界著名的学术信息出版机构美国科技信息所(ISI)推出的衡量科学研究绩效、跟踪科学发展趋势的基本分析评价工具,是基于汤森路透Web of Science(SCIE/SSCI)所收录的全球11000多种学术期刊的数千万条文献记录而建立的计量分析数据库。ESI对全球所有的SCIE、SSCI库中2005年以来的论文数据进行统计,按被引频次的高低确定出衡量研究绩效的阈值;ESI高被引论文已成为当前衡量和评价国家/地区科研水平、机构学术声誉、学科水平、科学家学术影响力以及期刊学术水平的一个重要指标。ESI Top 1.0 %高被引论文是指同年度同学科领域中被引频次排名前1.0%以内的文章。
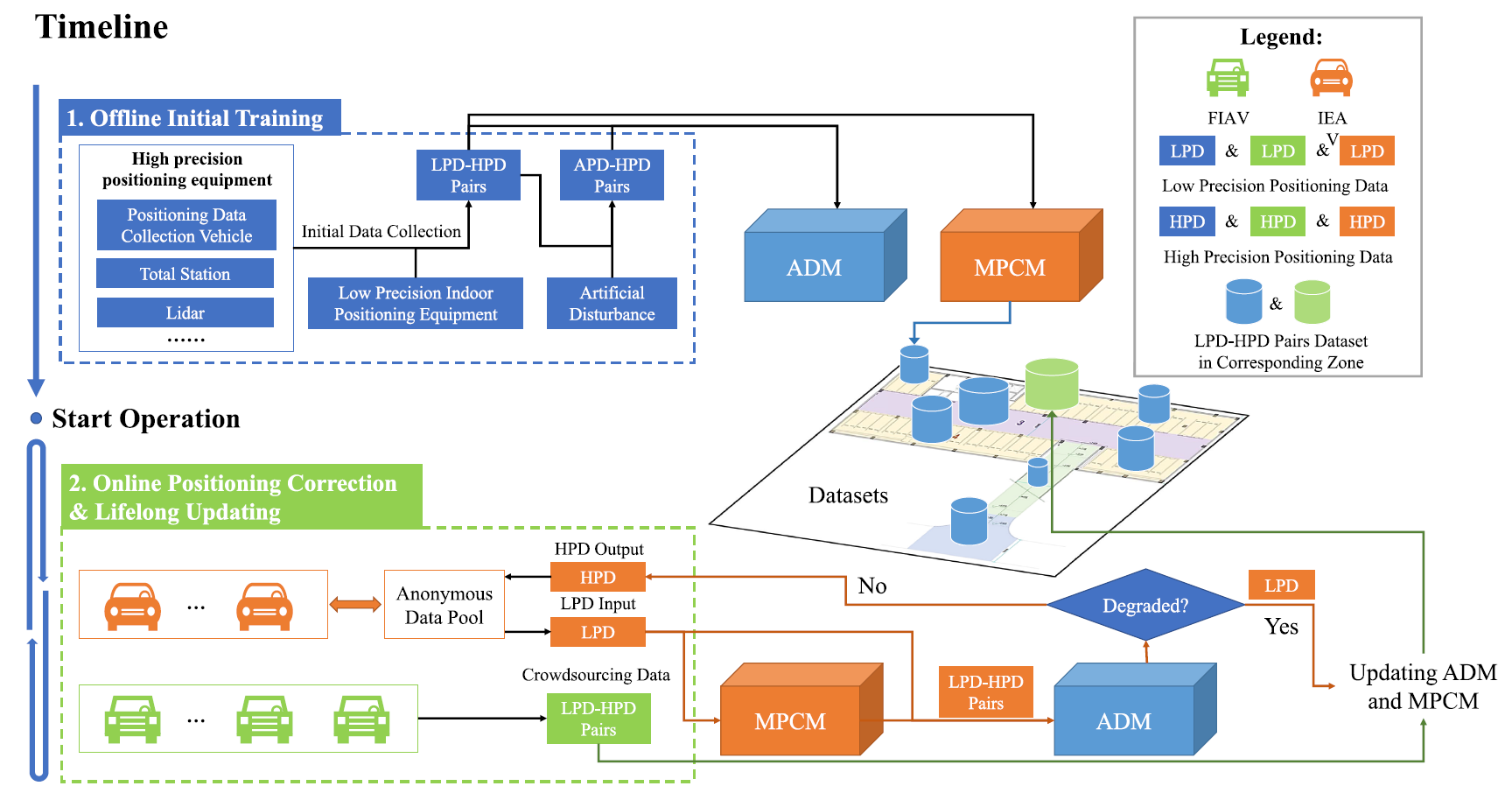
根据基本科学指标库ESI(Essential Science Indicators)的最新统计数据,以课题组赵聪副教授为第一作者,杜豫川教授为通讯作者,同济大学道路与交通工程教育部重点实验室为第一完成单位,发表在智能交通领域顶级国际期刊IEEE Transactions on Intelligent Transportation Systems(中科院一区,Top期刊,影响因子8.4)的论文“Data-Driven Indoor Positioning Correction for Infrastructure-Enabled Autonomous Driving Systems: A Lifelong Framework”(2023年,24卷,4期)入选工程(Engineering)领域ESI全球TOP 1.0%高被引论文。
该研究面向智能车库中自动代客泊车的高精度定位需求,针对无线室内定位技术在环境动态变化及长期运行下性能退化的问题,提出了一种数据驱动的终身学习室内定位误差校正框架。研究利用高配自动驾驶车辆的众包数据,构建了地图辅助的深度学习定位校正模型。该模型融合CoordConv、长短期记忆网络(LSTM)与Transformer以提取误差时空特征,并嵌入局部栅格地图生成器学习环境干扰机制;同时,开发了异常检测模型监控系统退化并引导更新,保障框架的终身稳定性。真实地下停车场的测试表明,该系统能在动态复杂的环境中保持高精度校正,将室内定位误差与车辆路径跟踪误差分别降低了60%和40%。该成果有效缓解了无线定位系统长期精度衰减的问题,为基础设施赋能的自动驾驶规模化应用提供了可靠的技术支撑。
ESI是由世界著名的学术信息出版机构美国科技信息所(ISI)推出的衡量科学研究绩效、跟踪科学发展趋势的基本分析评价工具,是基于汤森路透Web of Science(SCIE/SSCI)所收录的全球11000多种学术期刊的数千万条文献记录而建立的计量分析数据库。ESI对全球所有的SCIE、SSCI库中2005年以来的论文数据进行统计,按被引频次的高低确定出衡量研究绩效的阈值;ESI高被引论文已成为当前衡量和评价国家/地区科研水平、机构学术声誉、学科水平、科学家学术影响力以及期刊学术水平的一个重要指标。ESI Top 1.0 %高被引论文是指同年度同学科领域中被引频次排名前1.0%以内的文章。
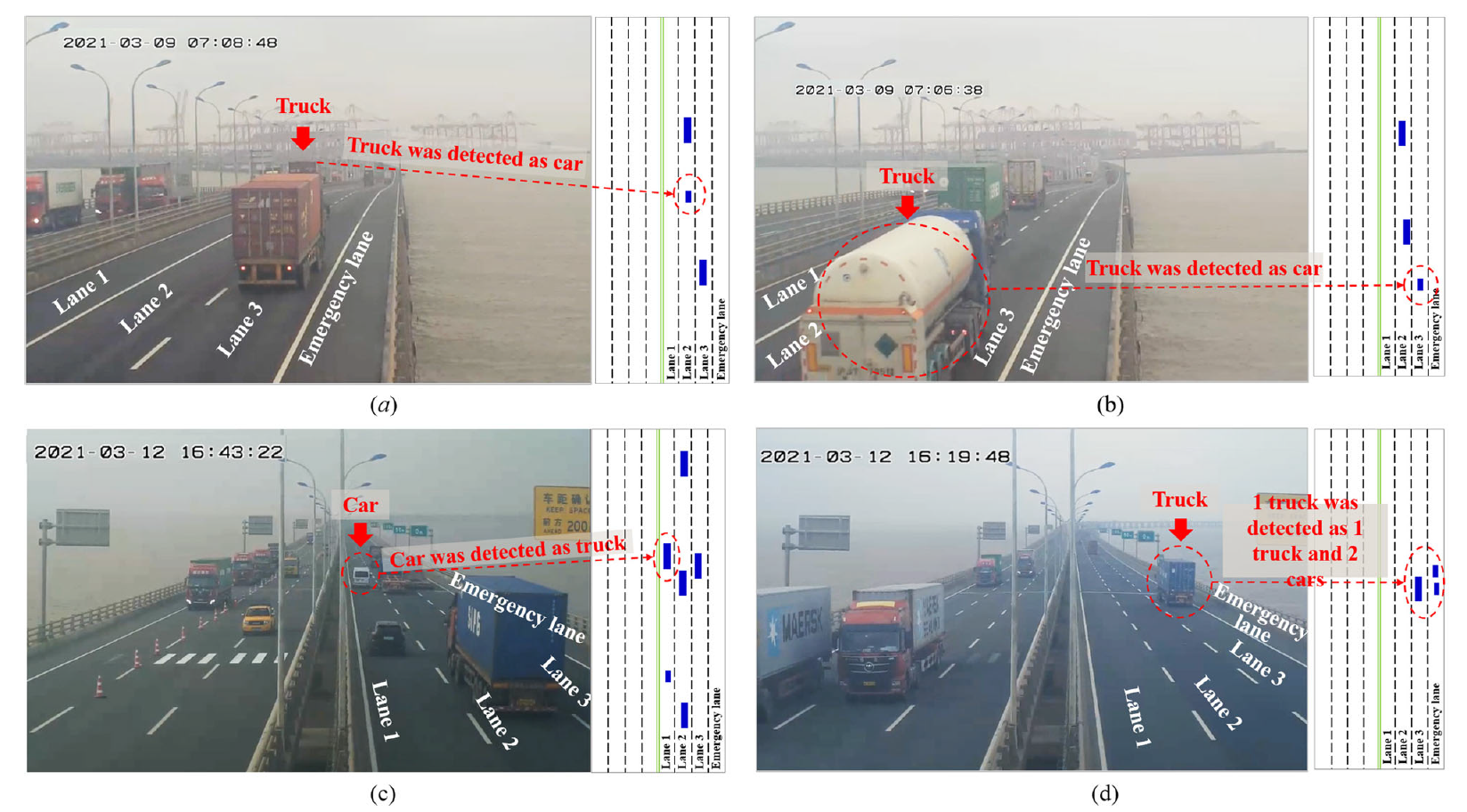
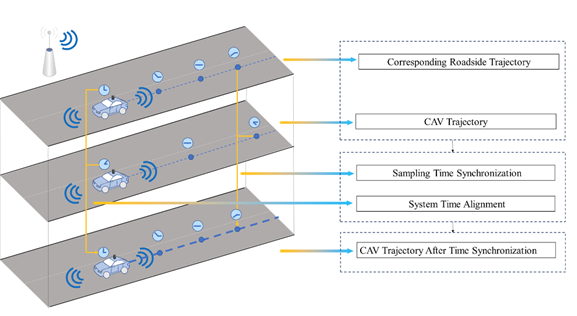
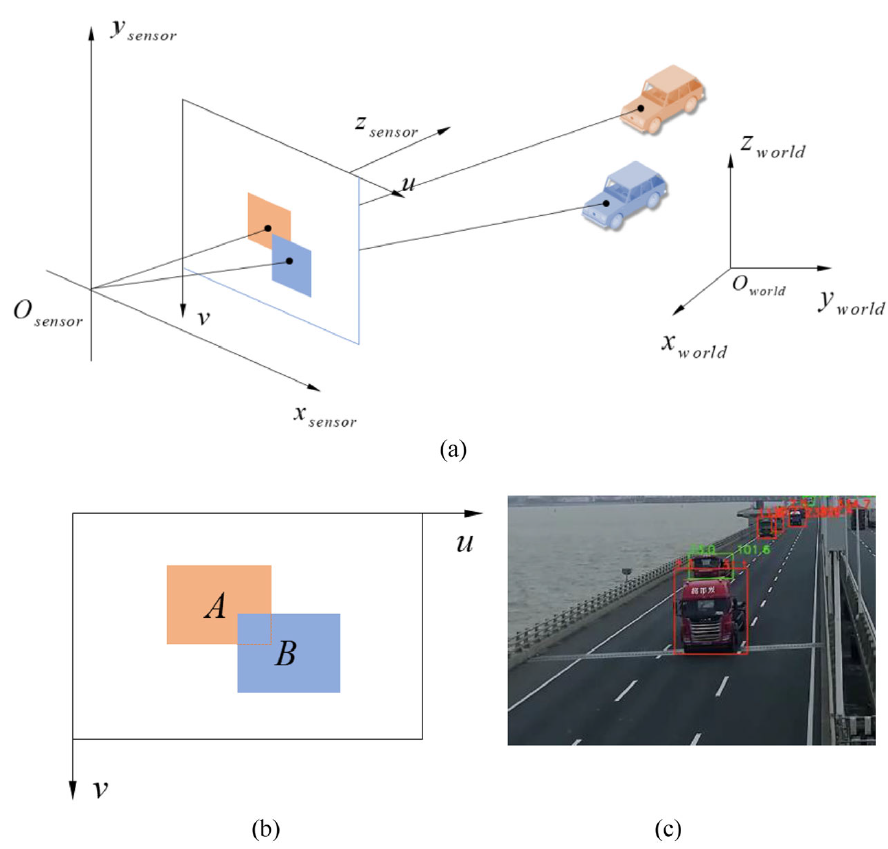
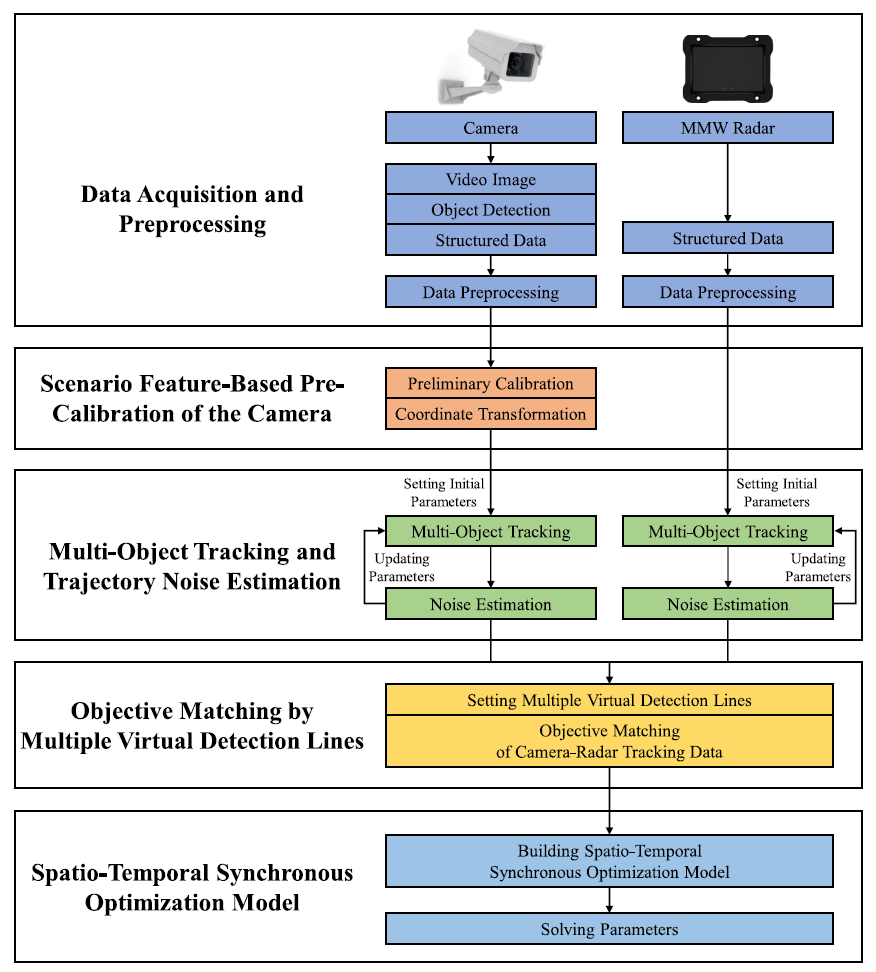
根据基本科学指标库ESI(Essential Science Indicators)的最新统计数据,以课题组杜豫川教授为第一作者,赵聪副教授为通讯作者,同济大学道路与交通工程教育部重点实验室为第一完成单位,发表在智能交通领域顶级国际期刊IEEE Transactions on Intelligent Transportation Systems(中科院一区,Top期刊,影响因子为8.4)的论文“A Novel Spatio-Temporal Synchronization Method of Roadside Asynchronous MMW Radar-Camera for Sensor Fusion”(2022年,23卷,11期)入选工程(Engineering)领域ESI全球TOP 1.0%高被引论文,同时入选ESI全球TOP 0.1%热点论文。
该研究面向车路协同系统中的感知智能需求,针对路侧毫米波雷达与相机在多源融合过程中由于采样频率不一致及时间戳不同步导致的感知精度瓶颈,提出了一套全新的路侧异步传感器时空同步方案。研究创新性地构建了“由粗到精”的时间同步机制,并结合单应矩阵实现了高精度的空间对齐。实验结果证明,该方法实现的时间偏移估计平均误差仅为4.3 ms。相比于目前广泛使用的最近邻匹配方法,该方法在目标距离维度的均方根误差降低了43.6%,在速度维度的RMSE降低了52.8%。研究成果为路侧多源传感器融合感知提供了新思路,为复杂交通场景下的高精度环境监测与车路协同应用提供了可靠的技术支撑,具有广阔的工程应用前景。
ESI是由世界著名的学术信息出版机构美国科技信息所(ISI)推出的衡量科学研究绩效、跟踪科学发展趋势的基本分析评价工具,是基于汤森路透Web of Science(SCIE/SSCI)所收录的全球11000多种学术期刊的数千万条文献记录而建立的计量分析数据库。ESI高被引论文与热点论文是国际公认的衡量学术影响力的核心指标,其中ESI Top 0.1%热点论文代表了相应领域最具前沿性和影响力的顶尖研究成果。
📝 Publications
IEEE Transactions on Intelligent Transportation Systems
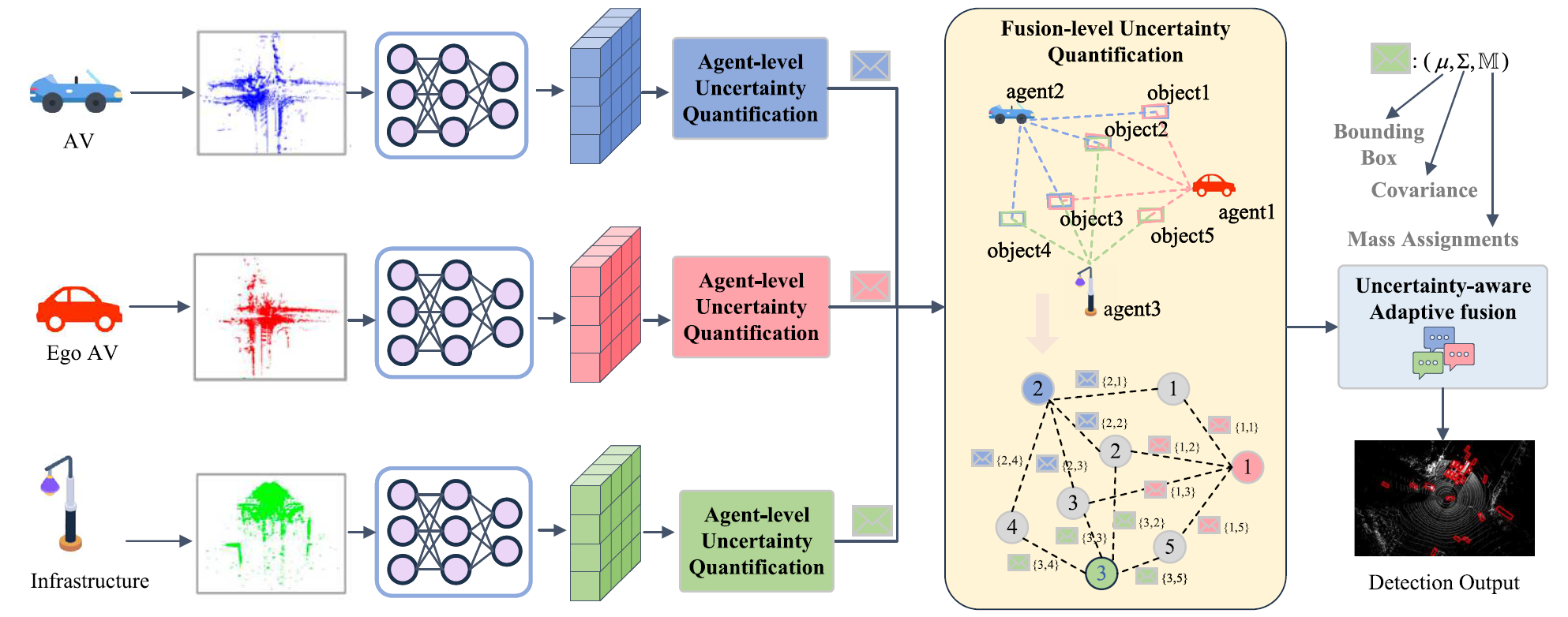
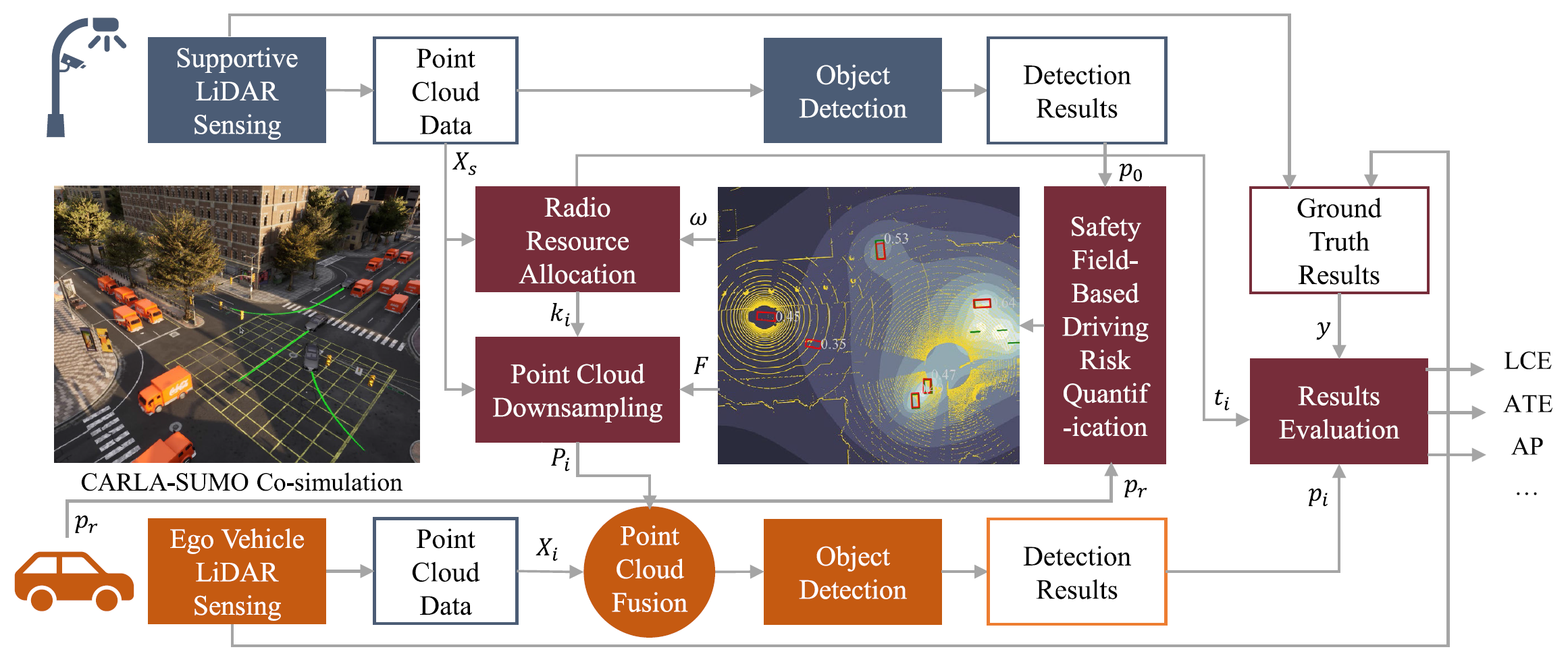
🔥New! BELT-Fusion: Bayesian Evidential Late Fusion for Trustworthy V2X Perception
Zhiguo Zhao, Cong Zhao*, Kun Chen, Yuxiong Ji*, Yuchuan Du
IEEE Transactions on Intelligent Transportation Systems
Cong Zhao, Tianyi Ji*, Andi Song, Yuxiong Ji, Chao Wang, Yuchuan Du*
IEEE Transactions on Intelligent Transportation Systems
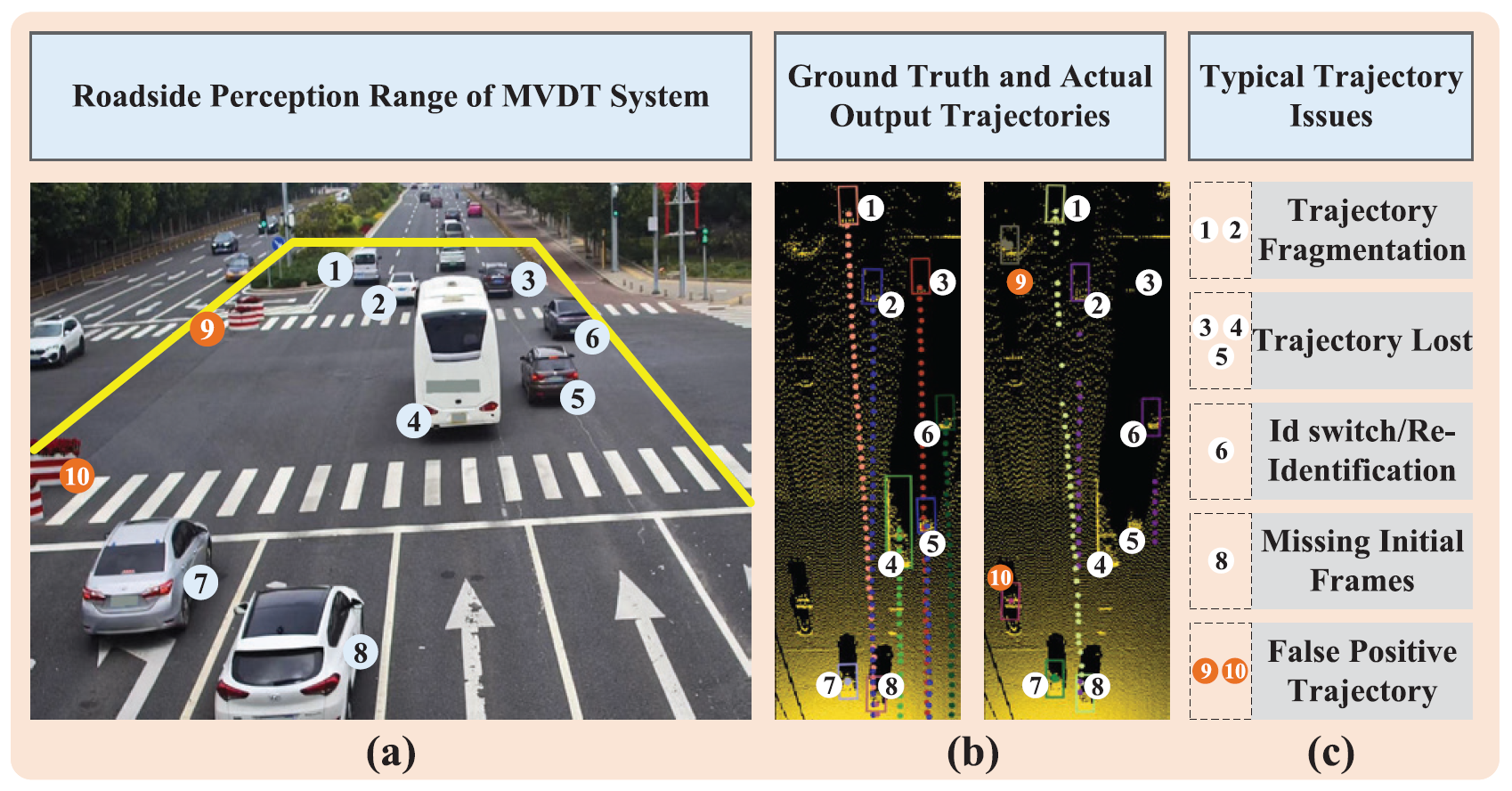
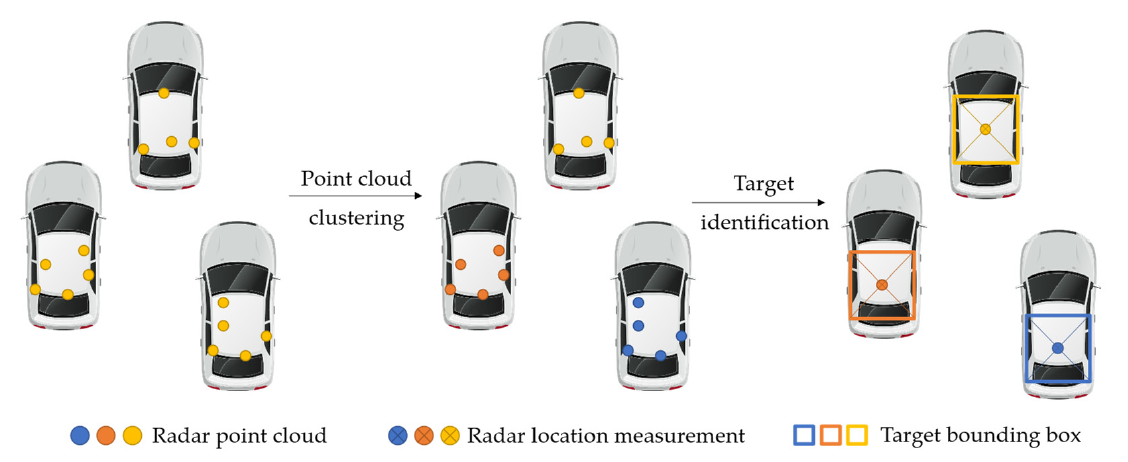
🔥New! Uncertainty-aware multi-vehicle detection and tracking using roadside 3D point clouds
Kun Chen, Cong Zhao*, Yuxiong Ji*, Chao Wang, Yuchuan Du
IEEE Transactions on Intelligent Transportation Systems
Zimu Zeng, Cong Zhao*, Shiyu Wang, Yuxiong Ji, Chao Wang, Yuchuan Du
Transportmetrica A: Transport Science
🔥New! A novel ellipsoidal safety potential field model for quantifying driving risk
Cailin Lei, Cong Zhao*, Kun Chen, Yuxiong Ji*, Yuchuan Du
Computer-Aided Civil and Infrastructure Engineering
Jing Chen, Cong Zhao*, Kun Gao*, Yuxiong Ji, Yuchuan Du
IEEE Transactions on Intelligent Transportation Systems
Cong Zhao, Delong Ding, Cailin Lei*, Shiyu Wang, Yuxiong Ji*, Yuchuan Du
IEEE Transactions on Intelligent Transportation Systems
Yuxiong Ji, Zhongke Xu, Cong Zhao*, Kun Chen, Yuchuan Du
International Journal of Transportation Science and Technology
Learning to search for parking like a human: A deep inverse reinforcement learning approach
Shiyu Wang, Haiyan Yang, Yijia Tang, Jing Chen, Cong Zhao*, Yuchuan Du
IET Intelligent Transport Systems
Chuna Wu, Jing Chen*, Jinqiang Yao, Tianyi Chen, Jing Cao, Cong Zhao*
Transportation Research Part B: Methodological
Xinghua Li, Xinyuan Zhang, Xinwu Qian, Cong Zhao, Yuntao Guo*, Srinivas Peeta
Expert Systems with Applications
Tianyi Ji, Cong Zhao*, Yuxiong Ji, Yuchuan Du
Knowledge-Based Systems
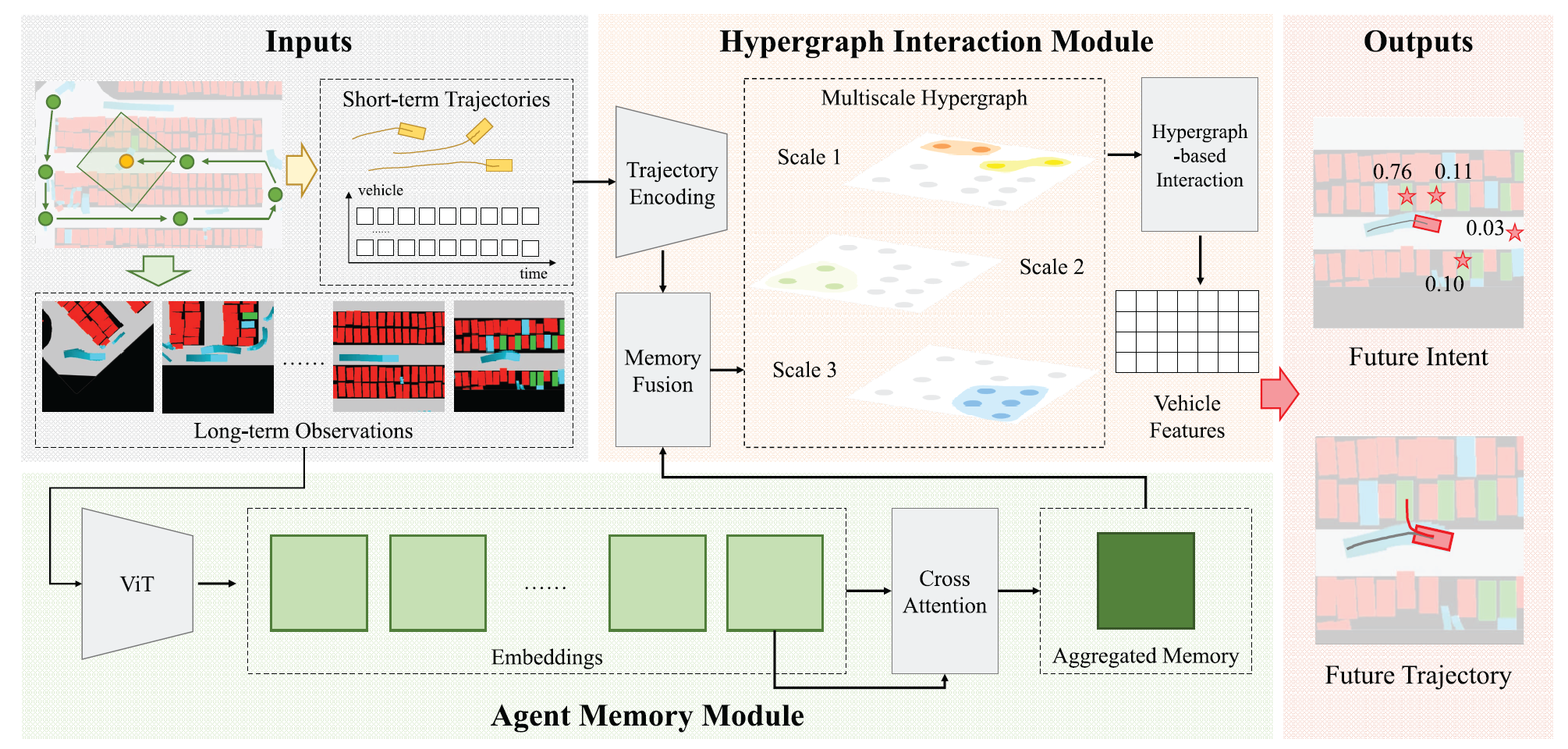
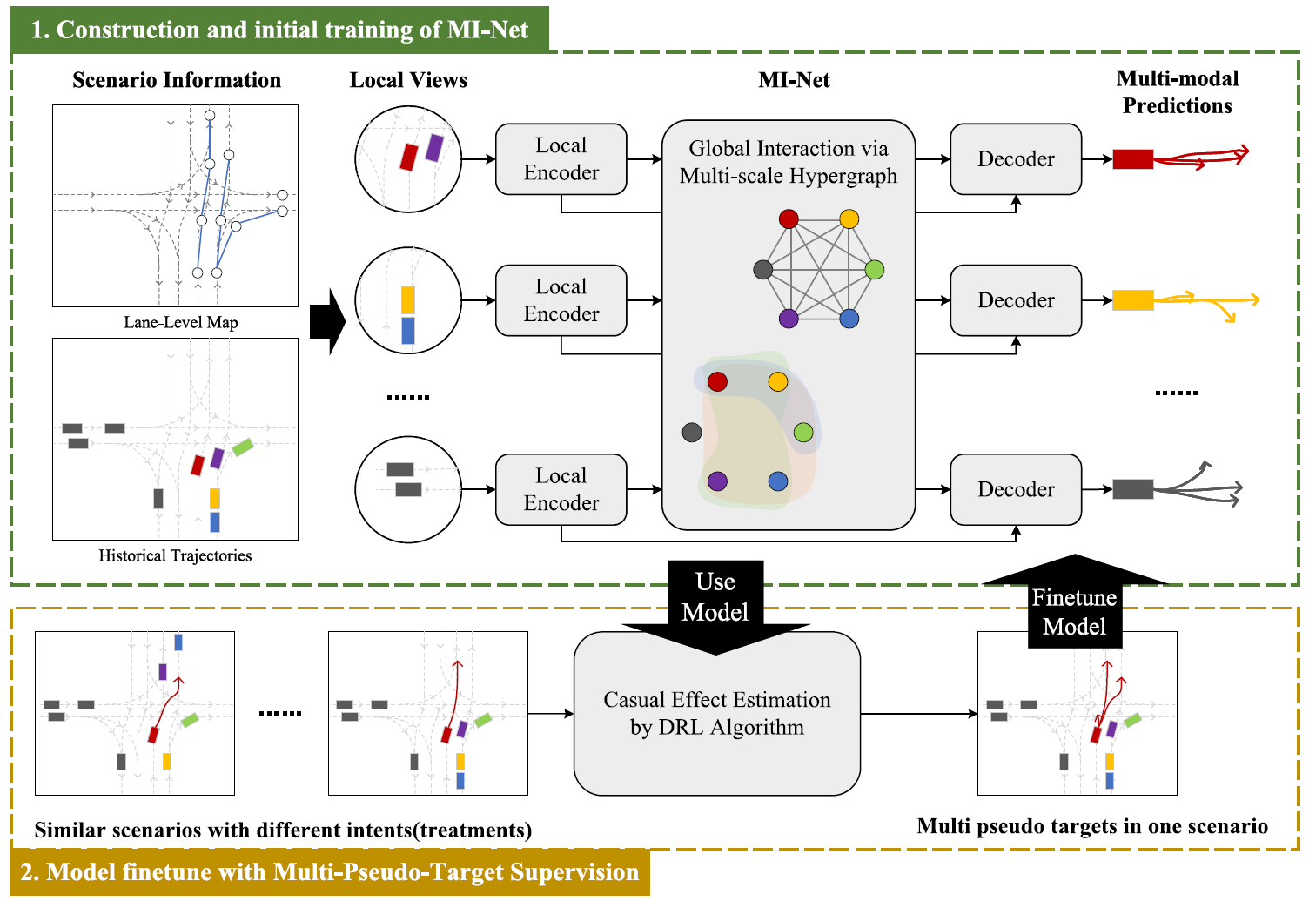
Multi-modal trajectory forecasting with Multi-scale Interactions and Multi-pseudo-target Supervision
Cong Zhao, Andi Song, Zimu Zeng, Yuxiong Ji*, Yuchuan Du
IEEE Transactions on Intelligent Transportation Systems
Cong Zhao, Delong Ding, Yupeng Shi, Yuxiong Ji*, Yuchuan Du*
IEEE Transactions on Intelligent Transportation Systems
Cong Zhao, Yupeng Shi, Yuchuan Du*, Shengchuan Jiang, Yuxiong Ji, Xiangmo Zhao
👉 Click to view Past Publications (点击查看往期论文)
Tunnelling and Underground Space Technology
Shanchuan Yu, Cong Zhao*, Lang Song, Yishun Li, Yuchuan Du
IEEE Transactions on Intelligent Transportation Systems
Cong Zhao, Andi Song, Yifan Zhu, Shengchuan Jiang, Feixiong Liao, Yuchuan Du*
IEEE Transactions on Intelligent Transportation Systems
Yuxiong Ji, Lantao Ni, Cong Zhao*, Cailin Lei, Yuchuan Du, Wenshuo Wang
International Journal of Environmental Research and Public Health
Jing Chen, Cong Zhao*, Shengchuan Jiang, Xinyuan Zhang, Zhongxin Li, Yuchuan Du
International Journal of Environmental Research and Public Health
Cong Zhao, Delong Ding, Zhouyang Du, Yupeng Shi, Guimin Su, Shanchuan Yu*
Computer-Aided Civil and Infrastructure Engineering
Yuchuan Du, Jing Chen, Cong Zhao*, Feixiong Liao, Meixin Zhu
IET Intelligent Transport Systems
Identifying and correcting the errors of vehicle trajectories from roadside millimetre‐wave radars
Cailin Lei, Cong Zhao, Yuxiong Ji*, Yu Shen, Yuchuan Du
Transportation Research Part C: Emerging Technologies
Cong Zhao, Andi Song, Yuchuan Du*, Biao Yang
Computers and Electrical Engineering
Yuchuan Du, Yupeng Shi, Cong Zhao*, Zhouyang Du, Yuxiong Ji
IET Intelligent Transport Systems
Yuchuan Du, Fengqi Wang, Cong Zhao*, Yifan Zhu, Yuxiong Ji
IEEE Transactions on Intelligent Transportation Systems
Cong Zhao, Yifan Zhu, Yuchuan Du*, Feixiong Liao, Ching-Yao Chan
Transportation Research Part C: Emerging Technologies
Xinyuan Zhang, Cong Zhao*, Feixiong Liao, Xinghua Li, Yuchuan Du
Journal of Advanced Transportation
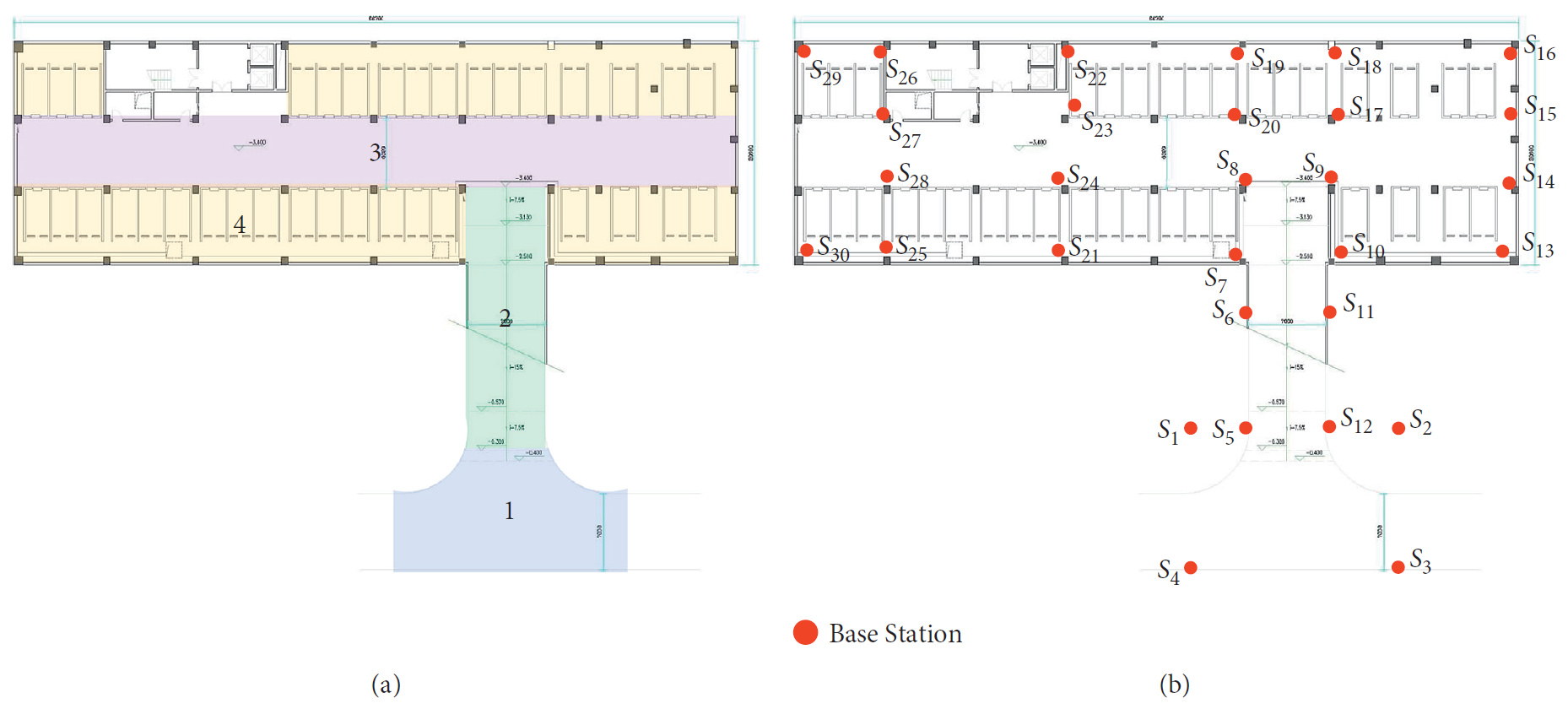
🔥ESI热点论文 🏆ESI高被引论文 A Practical and Economical Ultra-wideband Base Station Placement Approach for Indoor Autonomous Driving Systems
Shengchuan Jiang, Cong Zhao*, Yifan Zhu, Chenwei Wang, Yuchuan Du
Transportation Research Part C: Emerging Technologies
Yuchuan Du, Jing Chen, Cong Zhao*, Chenglong Liu, Feixiong Liao, Ching-Yao Chan
Journal of Transportation Engineering, Part A: Systems
Cong Zhao, Jing Cao*, Xinyuan Zhang, Yuchuan Du
IEEE Transactions on Intelligent Transportation Systems, 23(11), 22278-22289.
🔥ESI热点论文 🏆ESI高被引论文 A novel spatio-temporal synchronization method of roadside asynchronous MMW radar-camera for sensor fusion
Yuchuan Du, Bohao Qin, Cong Zhao*, Yifan Zhu, Jing Cao, Yuxiong Ji
Journal of Advanced Transportation
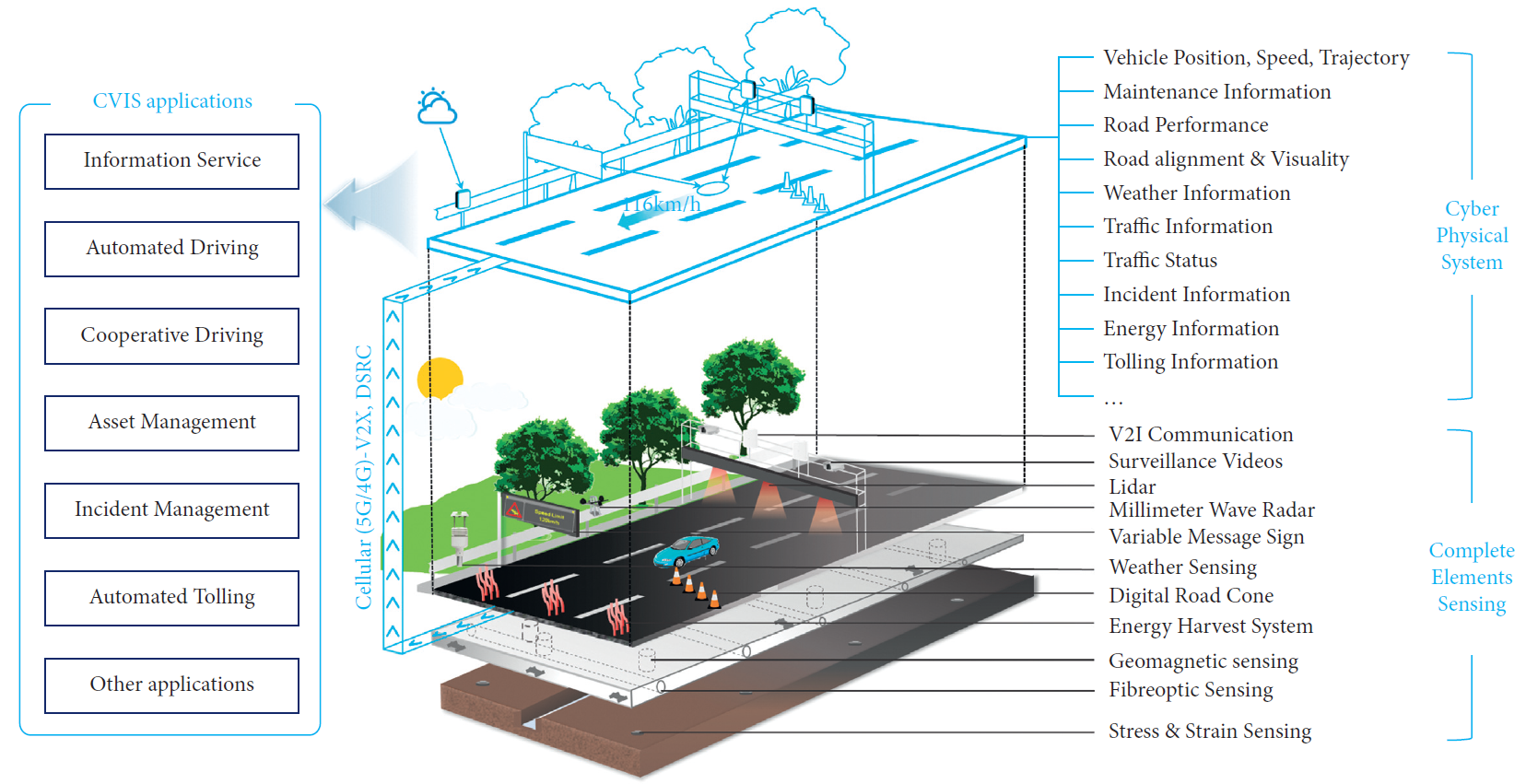
New generation of smart highway: Framework and insights
Chenglong Liu, Yuchuan Du*, Yiheng Ge, Difei Wu, Cong Zhao, Yishun Li
Transportation Research Part C: Emerging Technologies.
Cong Zhao, Feixiong Liao*, Jing Cao, Yuchuan Du*
📚 Patents
- 🔥
New!Zhao C, Du Y, Zhu Y, Ji Y. A method of infrastructure-augmented cooperative perception for autonomous vehicles based on voxel feature aggregation (GB2628958) - 🔥
New!Zhao C, Du Y, Qin B, Li X. A method for multi-sensor multi-vehicle tracking based on image and motion feature matching (GB2628516) - 🔥
New!Zhao C, Du Y, Qin B, Li X. Radar and video data fusion method for vehicle tracking based on deep learning and feature similarity (GB2628517) - 🔥
New!Zhao C, Du Y, Zhu Y, Ji Y. A vehicle-road cooperative perception method for 3D object detection based on deep neural networks with feature sharing (GB2618936) - 🔥
New!Zhao C, Du Y, Du Z, Ji Y. On-board positioning device-based roadside millimeter-wave radar calibration method (GB2620877) - 🔥
New!Zhao C, Du Y, Qin B, Xu A, Jiang S, Wang R, Li X. Multi-target vehicle detection and re-identification method based on radar and video fusion (GB2619196) - 🔥
New!赵聪, 钟凌云, 汪诗蕊, 杜豫川. 一种非完备感知数据下全域车辆轨迹构建方法 (ZL202210763169.7) - 🔥
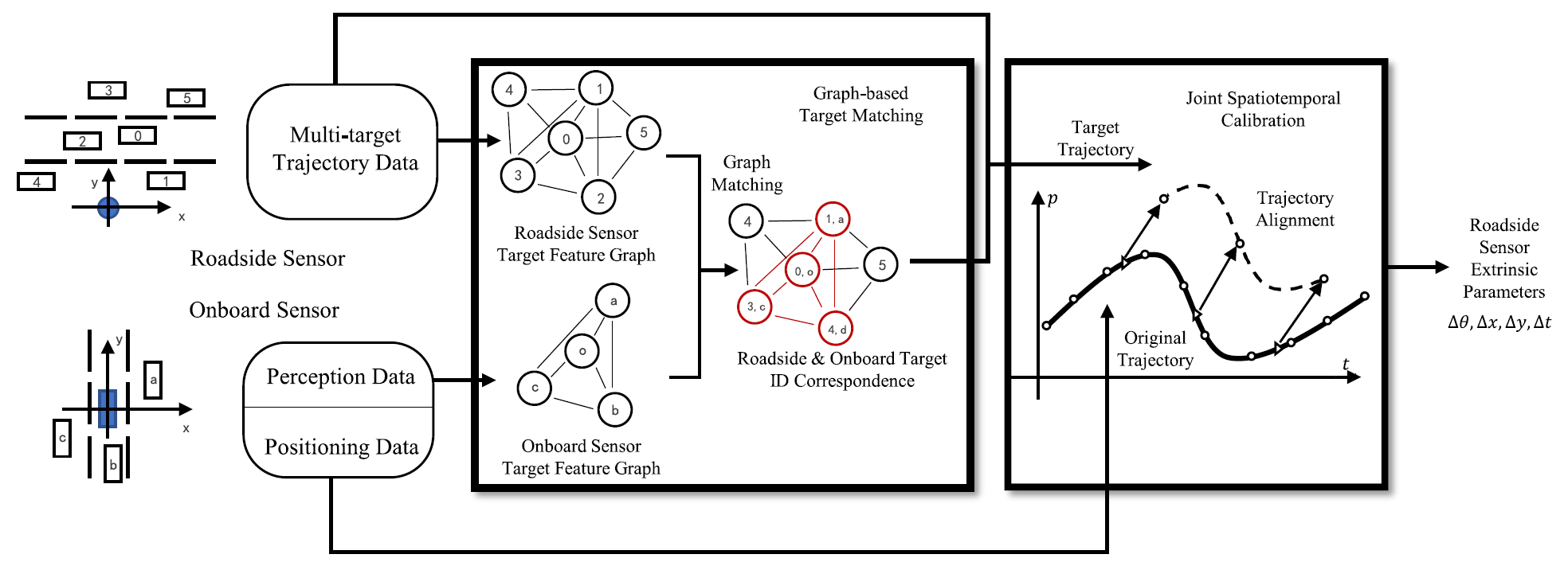
New!赵聪, 丁德隆, 师钰鹏, 杜豫川, 暨育雄. 一种基于图匹配的车路协同系统多传感器时空标定方法 (ZL202310021057.9) - 🔥
New!赵聪, 杜豫川, 宋安迪. 一种集群车辆运动轨迹预测方法 (ZL202111474976.9) - 🔥
New!赵聪, 陈锟, 暨育雄, 杜豫川. 基于不确定性量化的路域全量全要素可信感知方法及系统 (ZL202411902369.1) - 🔥
New!赵聪, 曾子沐, 卞庆杰, 杜豫川. 一种跨域车辆重识别及连续轨迹构建方法 (ZL202210763102.3) - 赵聪, 李涛, 汪诗雨, 杜豫川. 一种基于双层模型的停车资源精细化管理优化方法 (ZL202311201779.9)
- 赵聪, 师钰鹏, 汪诗雨, 暨育雄, 杜豫川. 一种跨域路侧感知多车辆关联方法及系统 (ZL202311239693.5)
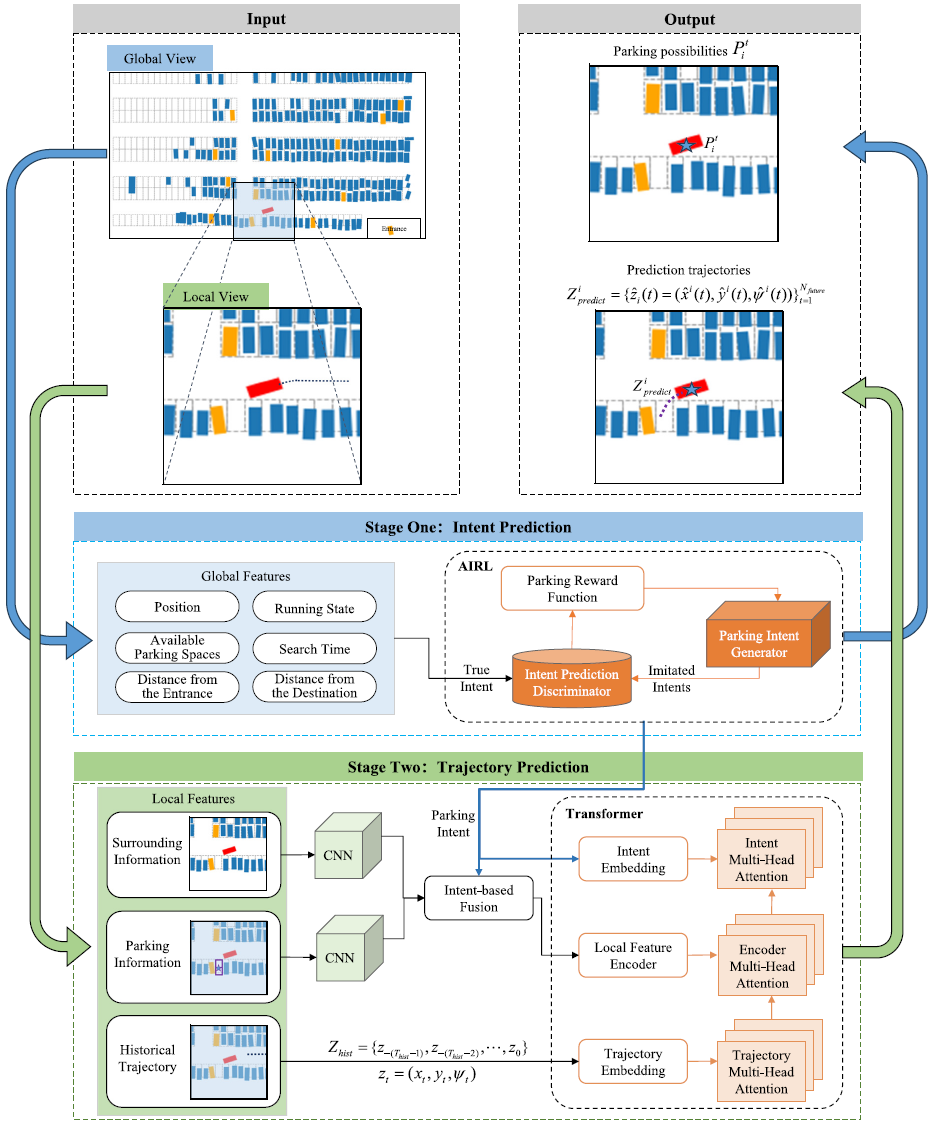
- 赵聪, 曾子沐, 宋安迪, 杜豫川. 一种面向自主代客泊车场景的车辆运动轨迹预测方法 (ZL202311335481.7)
- 赵聪, 宋安迪, 卢亚利, 郑丹妮, 周紫萱, 董家瑞, 吴鹏展, 杜豫川. 一种地下停车场盲区超视距感知及预警方法 (ZL202311151480.7)
- 赵聪, 宋安迪, 杜豫川. 一种面向路侧感知单元的车辆轨迹缺损数据修补方法 (ZL202111427550.8)
- 赵聪, 师钰鹏, 都州扬, 暨育雄, 杜豫川. 一种智能网联环境下路侧感知单元数据质量监测方法 (ZL202111465443.4)
- 赵聪, 都州扬, 师钰鹏, 杜豫川, 暨育雄. 一种道路交通感知轨迹数据的质量评估方法 (ZL202110789522.4)
- 赵聪, 杜豫川, 王凤淇, 魏斯璃. 一种路侧激光雷达点云坐标动态修正方法 (ZL202110124242.1)
- 赵聪, 杜豫川, 陈菁, 朱逸凡. 一种车路协同环境下的自动驾驶横向控制方法 (ZL202110131776.7)
- 赵聪, 杜豫川, 陈菁, 仇越. 一种车路协同环境下的自动驾驶纵向决策控制方法 (ZL202110131790.7)
🏆 Honors and Awards
🏅 Honors
- 2023, Young Talent Support Program of CAST, China Association for Science and Technology
- 2024, Shanghai Rising-Star Program (Class A), Shanghai Municipal Science and Technology Commission
- 2025, Oriental Talent Youth Program, Shanghai Municipal Education Commission
- 2022, First Prize of Shanghai Science and Technology Progress Award, Key Technologies and Applications of Digitalization and Intelligent Management for Urban Parking, Rank: 2nd
- 2024, First Prize of Invention Innovation Award, Key Technologies and Applications of Holographic Trustworthy Perception and Dynamic-Static Collaborative Control for Intelligent Road Network, Rank: 1st
- 2024, Second Prize of Shanghai Science and Technology Progress Award, Key Technologies and Applications of Cloud-Controlled Intelligent Navigation and Scheduling for Urban Public Transport, Rank: 4th
- 2022, Major Transportation S&T Innovation Achievement (Paper), Ministry of Transport of PRC, Macroscopic modeling and dynamic control of on-street cruising-for-parking of autonomous vehicles in a multi-region urban road network
- 2022, Major Transportation S&T Innovation Achievement (Paper), Ministry of Transport of PRC, Intelligent Evaluation Method for Trajectory Data Quality of Roadside Perception Vehicles